
Abstract
With the rapid development of power electronics technology, microgrid (MG) concept has been widely accepted in the field of electrical engineering. Due to the advantages of direct current (DC) distribution systems such as reduced losses and easy integration with energy storage resources, DC MGs have drawn increasing attentions nowadays. With the increase of distributed generation, a DC MG consisting of multiple sources is a hot research topic. The challenge in such a multi-source DC MG is to provide voltage support and good power sharing performance. As the control strategy plays an important role in ensuring MG’s power quality and efficiency, a comprehensive review of the state-of-art control approaches in DC MGs is necessary. This paper provides an overview of the primary and secondary control methods under the hierarchical control architecture for DC MGs. Specifically, inner loop and droop control approaches in primary control are reviewed. Centralized, distributed, and decentralized approach based secondary control is discussed in details. Key findings and future trends are also presented at last.
Similar content being viewed by others


Explore related subjects
Discover the latest articles and news from researchers in related subjects, suggested using machine learning.Avoid common mistakes on your manuscript.
1 Introduction
Modern power networks are complex adaptive systems which have undergone extensive changes over the past two decades. Microgrids (MGs), a novel structure of distribution networks, have emerged as a suitable solution for the installation of distributed sources in the grid [1, 2]. Today electrical systems are dominated by alterative current (AC), however, there is a clear tendency that high voltage (HV) and low voltage (LV), have seen the rise of DC systems and its implementation in power transmission and distribution [3]. The rapid development of power electronics technology has allowed the converters to operate at a wide range of DC voltage levels, including transmission, distribution and consumption level. Compared to AC MGs [3, 4], the advantages of DC MGs can be summarized as follows [5]:
-
1)
Most renewable energy resources, such as photovoltaic (PV) panels and fuel cells produce DC power. Even wind turbines, which intrinsically produce AC power, can be more conveniently integrated into a DC grid due to the absence of more power conversions.
-
2)
There is no need for reactive power management and frequency synchronization.
-
3)
Most of energy storage devices are also DC in nature. The battery technologies that are already provided with an internal DC-DC converter would be easily integrated to a DC bus with reduced cost and increased efficiency.
Given the advantages above, DC MGs have been widely accepted not only for utility grids, but also for more electric transportations, such as more electric aircraft [6], more electric ship [7].
Figure 1 shows the number of publications in the DC microgrid field in recent ten years. It is clearly seen that there is an increasing trend on the DC MGs over the past decade. Under such a context, this paper reviews the control strategies in DC MGs.

Number of publications on DC MGs in recent ten years
Figure 2 shows a typical DC MG configuration with a common DC bus. Multiple sources including solar panels, wind turbines, energy storage system (ESS) are connected to a single DC bus via power electronic converters (PEC). DC loads and AC loads are connected via DC/DC converters and AC/DC converters, respectively. It is worth noting that the DC MG topology may differ from radial single feeder configuration to two-pole or ring configuration.

Example of a single bus DC MG
Control strategies in such a multiple source based DC MG need to solve the following issues: 1) DC bus voltage maintenance; 2) Load sharing among parallel sources; 3) Power quality.
To tackle these issues, hierarchical control is often adopted because it introduces a certain degree of independence between different control levels. It is more reliable as it continues to be operational even in the case of failure of the centralized control. This paper is therefore focused on the review of existing hierarchical control techniques.
A hierarchical control architecture consisting of primary, secondary and tertiary control is illustrated in Fig. 3. Primary control copes with the preliminary power sharing control and current/voltage regulations [8]. Secondary control, a higher level than primary, deals with the voltage compensation and sharing performance enhancement [9]. As a highest level in the hierarchical architecture, tertiary control conducts power management [10], energy management [11], system optimization [12] economic dispatch [13, 14, 15]. Hierarchical control is achieved by simultaneously using local converter and digital communication link-based coordinated control, such as novel cloud-based communication platform [16, 17], which are separated by at least an order of magnitude in control bandwidth. From primary control to tertiary control level, control bandwidth decreases while time scale increases.

Hierarchical control architecture
This paper investigated various techniques applied in the primary and secondary controls as shown in Fig. 4. For each technique, the control principles and relating literatures are reviewed, followed by the detailed discussion in each section.

Schematic overview of the paper
The rest of this paper is organized as follows: Section 2 presents the state-of-art of the primary control in DC microgrid. Section 3 reviews the existing secondary control approaches which can be grouped into centralized, distributed, and decentralized categories. Section 4 discusses the evolving trends in MGs and finally Section 5 draws the conclusion.
2 Primary control
As one can see in Fig. 2, power electronic converters (including AC/DC converters and DC/DC converters) are essential components in DC MGs to provide controllable interface between loads and sources. From the control perspective in power converters, primary control consists of inner loops (current/voltage regulation) and droop control (preliminary power sharing). This Section shows the state-of-art primary control approaches on three-phase AC/DC converters and DC/DC converters. Section 2.1 discusses the inner loop of the AC/DC and DC/DC converters. Section 2.2 provides an overview of droop control covering the basic concept, conventional droop control applied in DC MGs and its inherent tradeoff, and finally introduces the recent advanced droop control methods.
2.1 Inner loop
2.1.1 AC/DC converter
Taking the three-phase voltage source converter (VSC) as an example, based on the vector control, inner loops regulate the AC current in synchronous rotating frame (dq frame), as shown in Fig. 5. After transforming measured currents from three-phase stationary frame to synchronous rotating frame, the linear controllers adjust current in dq domain and output dq voltage demands. Voltage demands are inversely transformed into three phase modulation indexes for pulse width modulation (PWM). The current reference I * d and I * q are determined by the required active power and reactive power respectively. Therefore, the VSC could control the active and reactive power independently.

Inner loop of the three-phase voltage source converter (AC/DC converter)
2.1.2 DC/DC converter
Types of DC/DC converters [18, 19] may vary but the control can be generalized into two categories: voltage control mode and current control mode (power control mode). The DC/DC converter under voltage control mode sets the voltage reference and operates as a controllable voltage source. Alternatively, the converter under current/power control mode behaves as a controllable current/power source. The output current/power are regulated to follow the given reference. Figure 6a shows a single voltage loop when the converter is working in voltage control mode. The output of the voltage controller Gv is the duty cycle. V ref o could be given by a V-I droop characteristic which will be shown in the next subsection. Figure 6b shows the inner loop when the converter operates in current control mode. The duty cycle is obtained through a current regulator. Current reference Iref could be given by an I-V droop characteristic (see next subsection). Figure 6c shows another option of DC/DC converter working in voltage-control mode. A cascaded loop is employed. Given voltage reference, the voltage controller Gv provides the inductor current reference and the switching signals are given by the output of the current controller GI.

Inner loops of DC/DC converters
2.2 Droop control
Voltage droop control has been widely accepted since there is no dependency on the communication lines. Usually, “droop control” is realised by adding a “virtual resistance” into the existing system. The “virtual resistance” is an ideal value which will not be affected by its working condition, such as temperature, and no “real” power loss will be produced, whereas the “real resistance” is not a fixed value which could change with the environmental factors and will cause “real” power losses which should be minimised. This virtual resistance is also called droop gain, droop constant or droop coefficient.
Initially droop control was employed in AC systems [20]. In an inductive dominant distribution network, active power is highly dependent on the power angle δ, which is dynamically controlled by the frequency, and the reactive power is mainly determined by the AC voltage V. Figure 7 shows the relationship between the P-Q circle of a distribution generation (DG) unit and P-f/Q-E droops. In AC systems, P-ω and Q-V droop are formulated as follows:
where ω and V are the frequency and amplitude of the output voltage measurement; ω* and V* are the frequency and voltage references; P and Q are the active power and reactive power measurements; P* and Q* are the active and reactive power references; kP-f and kQ-V are the proportional gain for the P-f and Q-V droop characteristics, respectively.

P-f and Q-V droop control relationship in AC MGs [20]
Similarly, the droop concept has been successfully employed in DC systems. In contrast to the AC systems, the concept “reactive power” is not applicable and only active power can be transferred. The amount of active power transferred in the DC network can be defined by the DC voltage. Therefore, in DC systems a similar droop control can be built by setting a relationship between active power P and DC voltage V in order to achieve the desired load sharing by adjusting the voltage.
2.2.1 Droop control categories
In power electronic converters based DC MGs, the basic droop control concept can be implemented either as current/power mode droop, including Current-Voltage (I-V) and Power-Voltage (P-V) strategies or as voltage mode droop, including V-I and V-P strategies [21]. The I-V and P-V droop methods are shown in Fig. 8 [22]. In the implementation of these control methods, the DC voltage is measured and the injected current/power is controlled according to the droop characteristic. Alternatively, for the V-I and V-P methods shown in Fig. 8c, d, current or power is measured and the DC voltage is regulated accordingly [23].

Droop characteristic employed in power electronic converters [21]
It is shown in [24] that I-V and P-V demonstrated similar performance (both models are almost equivalent with little difference when small voltage errors are considered). Figure 9 shows the voltage-current (or power) characteristics for both P-V and I-V droop-controlled terminals. It is obvious that both models are almost equivalent with little difference when small voltage errors are considered. For this reason, I-V droop can be a representative of the current/power mode strategies. Similarly, V-I droop characteristic can be investigated within the voltage mode methods (V-I and V-P).

Comparison of power based and current based voltage droop characteristic [24]
-
1)
Voltage-mode
Voltage-mode approach employs the V-I droop characteristic which uses the measured branch current to generate the terminal voltage reference. The control scheme for voltage-mode droop-controlled VSC is shown in Fig. 10. As expressed in (3), the DC voltage reference is generated according to the branch output DC current using the V-I droop characteristic:
$$ V_{dc}^{*} = V_{o} - I_{dc} k $$(3)where Vo is the nominal bus voltage; k is the droop gain; Idc is the DC current measurement; V * dc is the generated DC voltage reference.
Fig. 10 
Voltage-mode droop control scheme

-
2)
Current-mode
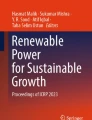
The current-mode approach uses the measured voltage to calculate the desired injecting DC current. The current-mode droop control scheme is shown in Fig. 11 with the current reference derived from the I-V droop characteristic, based on the DC voltage measurement:
$$ I_{dc}^{*} = \frac{{V_{o} - V_{dc} }}{k} $$(4)where Vdc is the DC voltage measurement and I * dc is the generated DC current reference.
Fig. 11 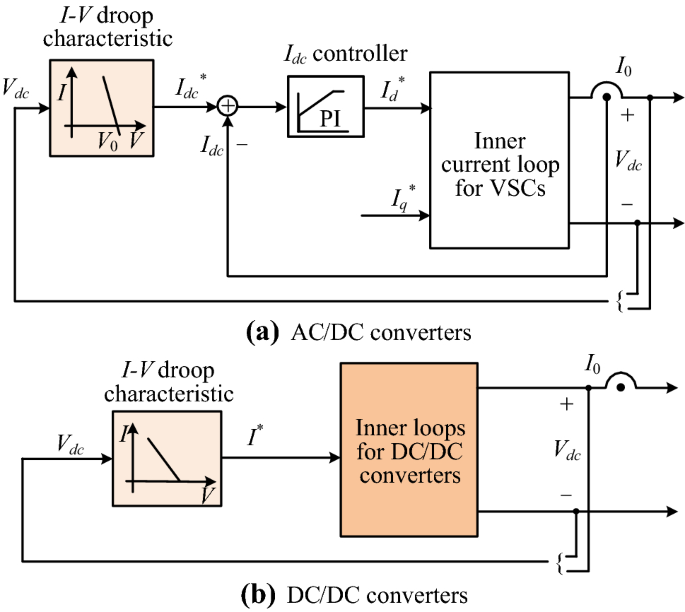
Current-mode droop control scheme
Overall, the current-mode primary control scheme and voltage-mode primary control scheme for parallel VSCs can be presented in Fig. 12a, b, respectively.
Fig. 12 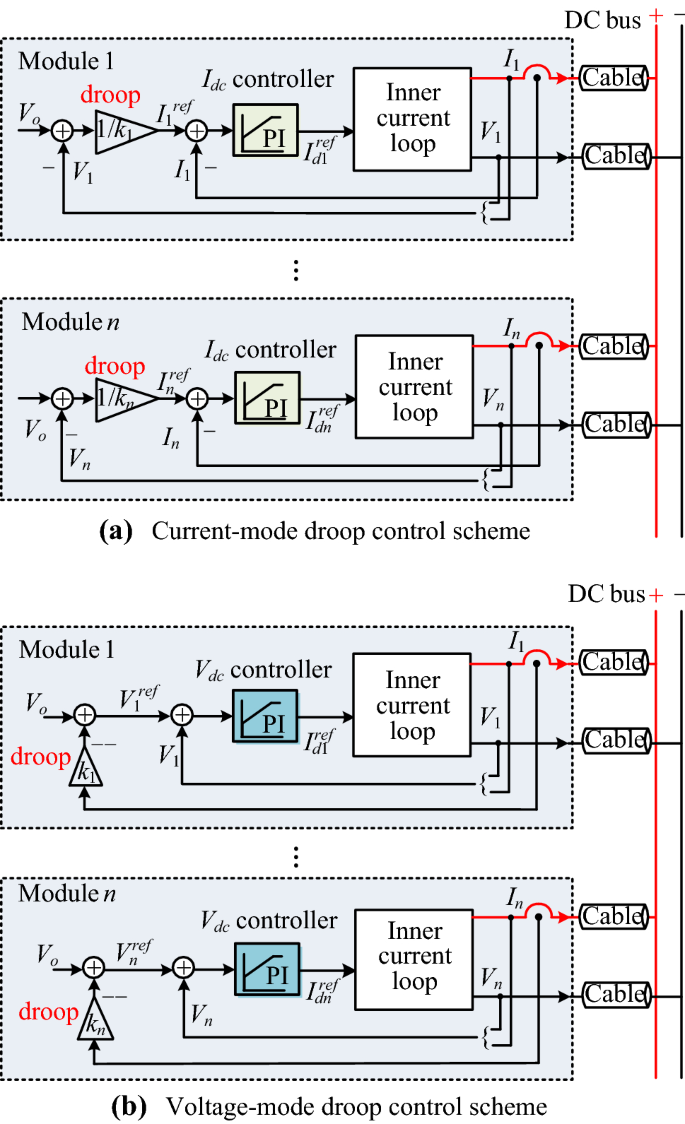
Primary control diagram


2.2.2 Trade-off
As a decentralized control method to realize desirable power sharing, droop control increases the system modularity and reliability. However, the impedance on the distribution line will also affect the performance of droop control. Moreover, the cable resistance is subject to changes, such as temperature variation. Also, difference of the nominal voltage will lead to load sharing performance degradation.
Taking the two parallel connected DC sources as an example, unequal load sharing due to small error in nominal voltages is illustrated by Fig. 13. If a small droop gain kA is applied, the difference in the twin source currents is (I2o−I1o). Alternatively, if a larger droop gain kB can be used and the difference in the source currents reduces to (I2 – I1). Thus, it indicates that the system with large droop gains have better current sharing performance.

Principle of secondary control on DC voltage restoration in DC MGs
In addition, under the condition of load IL, the main bus voltage will reduce to VLA if a small droop gain kA is applied whilst reduce to VLB if a large droop gain kB is applied. It implies that voltage regulation performance of the system with small droop gains is superior to the one with large droop gains.
Therefore, for droop control there is an intrinsic trade-off between voltage regulation and current sharing which implies the necessity of secondary control (will be discussed in Section 3).
2.2.3 Advanced droop control
Apart from the conventional linear droop control, different types of droop characteristic (including inversed droop, non-linear droop, and adaptive droop) have been investigated in order to cope with the trade-off and improve the system performance.
-
1)
Inversed droop control
In [25], an inverse-droop control is proposed to achieve power sharing including input voltage sharing and output current sharing for input-series-output-parallel (ISOP) DC-DC converters. With the proposed inverse-droop control, the output voltage reference rises as the load becomes heavy.
-
2)
Non-linear droop control
In [26], a nonlinear droop control is proposed in which the droop gain is a function of the output current of the DC/DC converter. The proposed non-linear droop method can increase droop resistance when load increases. Thus, it solves the trade-off in conventional droop methods, i.e., it achieves better load sharing at heavy load and tighter voltage regulation at light load. Reference [27] proposes three novel non-linear droop control algorithms: high droop gain methods (HDG), polynomial droop curve (PDG), polynomial droop curve with voltage compensation (PDCVC). Among all three proposed non-linear droop control methods, HDG offers the best voltage regulation but suffers poor power sharing at light load conditions whilst PDCVC provides the best performance at heavy load conditions. PDC method offers good load sharing and considerable voltage regulation under all loading conditions.
-
3)
Dead-band droop control
A droop-controlled DC system with the integration of energy storage system is investigated in [28] and [29]. A dead-band droop characteristic is proposed for the battery energy storage system to introduce a “floating” or standby working mode, avoiding the unnecessary repetitive charging and discharging.
-
4)
Adaptive droop control
In [30], a novel droop that controls the nominal voltage is proposed to achieve good load sharing. However, this method only considers the load sharing among sources with same ratings which does not take different capacity of sources into account. In [31], a gain-scheduling technique is proposed which can achieve relative good voltage regulation and power sharing simultaneously by adjusting droop constant rather than simply selecting a large droop at the cost of voltage regulation or selecting a small droop at the cost of load sharing. This method needs to examine the voltage error for different droop gain under various load condition and then derives a certain relationship between load condition and droop constant. Reference [32] proposes State of Charge (SoC) based adaptive droop control to achieve dynamic SoC balancing and appropriate power sharing. In [33], analogue circuit is employed to improve the current sharing performance which actually is scaling up the droop gain, and the larger voltage drop owing to the enhancement of droop gain is compensated by increasing the voltage at a certain interval. In [34], a decentralized power sharing approach is proposed taking the line impedance into account in a low voltage DC MG including a PV, battery ESS. Grid-connected and islanded modes are considered and corresponding droop gains are discussed.
Table 1 lists the state-of-art of the droop based primary control approaches in DC MGs.
3 Secondary control
As discussed in Section 2, there is a trade-off between power sharing performance and voltage regulation. High droop gain can guarantee precise power sharing among the sources while the voltage regulation performance is poor, i.e., voltage deviation is large under high droop gains. In order to maintain the bus voltage for a droop-controlled DC MG at the nominal value, a secondary control level is introduced which sets the reference to the primary control and maintains the controlled parameter within an optimization range [40]. Figure 14 shows the principle of the secondary control in DC MGs. As one can see, when the primary control is implemented, the system operating point will move from vo (voltage at no load condition) to OP1 under idc1 load condition and from vo to OP2 under idc2 load condition, respectively. After activating the secondary control, the operating point will shift from OP1 to OP1_new and OP2 to OP2_new, i.e., the system always works at nominal voltage level.

Principle of secondary control on DC voltage restoration in DC MGs
Therefore, unlike the voltage/frequency restoration in AC MGs [41,42,43], the main task of secondary control is to eliminate the voltage deviation and meanwhile improve the power quality.
From the communication link point of view, the secondary control can be implemented with centralized, distributed and decentralized control policy [44].
3.1 Centralized secondary control
As shown in Fig. 15a, centralized control (sometimes called supervisory control) can be implemented in DG based DC MG by employing a centralized controller and a digital communications network to connect it with sources and loads. Figure 16 shows an example of centralized secondary control in voltage-mode droop-controlled VSCs. Centralized controller, sometimes called supervisory control, will send the voltage adjustment signals to each module via communication networks.

Control categories based on communication links

Example of classic centralized secondary control in voltage-mode VSCs
In [45], a multilayer supervision system is proposed to cope with power balancing and energy management in the PV penetrated MG. In [46], a classic hierarchical three level control structure is proposed so that good load sharing and voltage regulation can be achieved simultaneously. Secondary control is implemented via a voltage PI control to eliminate the voltage deviation owing to voltage droop. Reference [47] shows an application of centralized secondary control in DC/DC converters based DC MG. Reference [48] presents a DC-bus signalling secondary control for islanded DC MGs.
3.2 Distributed secondary control
Distributed control indicates the control principle whereby a central control unit does not exist and a communication line exists between the neighbouring modules, as shown in Fig. 15b. The main advantage of this approach is that the system can maintain full functionality, even if the failure of some communication links occurs, provided that the communication network remains connected. Therefore, distributed control is immune to a single point of failure (SPOF) [49,50,51,52]. Differently from centralized control, the information directly exchanged between the local controllers contain only locally available variables. In other words, if the two units are not connected directly by the communication link, they do not have direct access to each other’s data and their observation of the whole system is limited. To tackle this issue, distributed control can be grouped into three categories: average current or voltage sharing scheme, dc bus signalling scheme, and cooperative control scheme.
3.2.1 Average current/voltage sharing
As shown in Fig. 17, an enhanced droop control with improved voltage regulation is proposed in [53]. PI controllers are used to regulate the average voltage and current.

Secondary control scheme proposed in [53]
As shown in Fig. 18, in [54] a large droop gain is recommended to overcome the load sharing error caused by line resistance and average current is used to modify every droop characteristic line so that every droop line will be shifted up by a same amount with the increase of the load. The average current needs to be computed and the chosen of shift gain becomes important which is not easily implemented in reality. Reference [55] proposes a secondary control method using three PI controllers. The average voltage, current and droop gain is calculated respectively and the droop gain is tuned by the combination of average current and droop gain controllers. In [56], a unified compensation method is proposed using the common load condition to compensate the voltage drop. Reference [57] shows a distributed secondary control for energy storage units SoC of batteries is estimated. Reference [58] proposed a secondary control scheme while setting a high droop gain in order to ensure appropriate power sharing performance. An average voltage sharing control is proposed in [59]. A distributed secondary control utilizes the low-bandwidth communication channel to provide a computed average control signal to its primary controller.

Secondary control scheme proposed in [54]
3.2.2 DC bus signaling
References [60] and [61] show distributed secondary control based on DC bus signaling. In [60], the DC bus voltage threshold monitors the action of interface converters of sources and loads in the operation of a DC nanogrid. Four different operation modes of a PV modular system are presented in [61].
3.2.3 Cooperative control
The objective of distributed cooperative control is to find a local control protocol that drives all nodes to have the same constant steady-state values, known as the consensus value. In order to overcome this problem, different distributed control protocols such as consensus algorithm [62,63,64,65,66,67,68,69,70,71].
Figure 19 shows the principle of consensus algorithm. The variables can be module current, voltage or SoC if energy storage is integrated. The exchanging variables can be module current or voltage.

Consensus algorithm [64]
In [65] a complete DC MG model using a discrete-time approach with consideration of the consensus algorithm is proposed. The impact of communication topology and the communication speed are studied in detail. In [66], a distributed secondary control using dynamic consensus algorithm is applied in multiple DC electric springs. Reference [67] and [68] show an event-triggered distributed secondary control for DC/DC boost converters based DC MG to deal with average voltage regulation and current sharing. Reference [69] proposes a multi-agent based distributed control of heterogeneous storage devices (ultra-capacitor, battery). The cooperative control could tackle with the SoC balancing between the battery systems and power sharing coordination among multiple energy storage devices. In [70], a consensus algorithm is developed in modular DC-DC converters. The proposed cooperative control is implemented on a sparse communication graph across the MG, reducing the number of communication lines.
Other algorithms such as gossip algorithms are attractive since they are robust to SPOF and unreliable wireless network. Due to its asynchronous property, only one random node chooses other node(s) to exchange their estimates and update them to the global information [72,73,74].
3.3 Decentralized secondary control
Decentralized control uses local measurement to implement local regulation, as shown in Fig. 15c. Since communication links among the sources and an additional centralized controller are not needed, each parallel module can work independently relying on the local measurements and controllers, which increases the system reliability.
In [75], a proportional controller is proposed and implemented to attenuate the influence of the cable impedance in the secondary control layer. The communication only exists in local distributed sources and all the variables for control are locally measured and transferred. The estimated gain is used to cancel the line impedance in order to achieve better power sharing performance. In addition, [76] presents a decentralized secondary power sharing control in a droop-controlled LVDC MG where a new injected AC frequency-DC current droop characteristic is proposed.
In [77], a feedforward term is added to the terminal voltage reference for each module Similar to the droop characteristic of each individual module at the DC terminal, the DC bus voltage and total load current also follows a droop characteristic. Only the load current needs to be measured and no additional DC voltage controller is in need. If multiple loads are in presence and distributed among the MG, the total load current measurement can be obtained at the main feeders (if this exists) which supplies the power to all loads.
3.4 Summary of secondary control
Secondary control approaches in DC MGs can be summarized into three categories: centralized, distributed, and decentralized control. Table 2 compares the features of the three abovementioned secondary control categories. As one can see, a digital communication link (DCL) is required for centralized and distributed control. This will reduce the reliability of both control strategies. Especially for the centralised control, the potential single point of failure exists in the centralised controller.
Based on the number of references in each category, it can be seen that distributed control strategies have recently spurred a great amount of interests. Table 3 summarizes the state-of-art distributed secondary control approaches, such as DC bus signaling, average current sharing and cooperative control strategies. The data such as voltage, current or battery SoC are exchanged via communication links to work out the whole network knowledge.
4 Future trends
4.1 Hybrid AC/DC microgrid
The use of low voltage DC to supply information technologies (IT) loads is rapidly becoming standard. In these systems, DC is seen as an opportunity to improve reliability and to reduce energy losses and costs. Today the market of photovoltaics, batteries, power electronics and IT hardware keeps growing as these technologies become more cost-competitive. The use of DC could be therefore extended to further types of loads, generation and storage which proliferated hybrid AC-DC MGs [78, 79].
In the presence of individual AC and DC grids, the hybrid AC-DC MG facilitates interconnection of various AC and DC-based renewable energy sources which effectively reduces multiple power conversion stages and as a consequence improves system efficiency.
The control in hybrid AC/DC MGs is more complicated due to the absence of a global variable which can be used for power-sharing, voltage and frequency regulation. Control of the interlinking converter such as per unitized voltage and frequency control on both sides are proposed [80,81,82] and can be further investigated.
4.2 Real-time energy management
Future MGs will be localized distribution systems composed of distributed generators, flexible loads, and energy storage elements that are networked together using advanced communication technologies. Energy management in MGs is usually formulated as an offline optimization problem for day-ahead scheduling. The future challenge is to provide reliable and secure electricity service despite large variation in available generation by rapidly connecting, disconnecting and controlling non-critical loads in a dynamic manner. Under such conditions the management of the embedded stored energy in the MG over timescales of milliseconds (e.g. converter DC link capacitors) to hours (e.g. Li-ion UPS batteries) is of critical importance.
Real-time energy management offers the benefits of being able to detect damaging or potentially dangerous problems as soon as they happen [83,84,85]. It is clear that future microgrid will contain the following new technologies to ensure reliable operation to provide fundamental electrical controllability, a fast inter-converter communication system to coordinate control and operation of potentially hundreds or thousands of electrical sub systems, a high level energy management system to dispatch embedded generation and optimize operation of in-built storage devices.
4.3 Stability and control
Many loads in DC MGs are tightly controlled by power electronics. These loads often behave as constant power loads (CPLs) and present negative incremental impedance resulting in degrading stability margins. Hence, new control strategies need to be investigated in order to achieve a wide range operation scenario in DC microgrids. Reference [86] proposed a Lyapunov based control approach that compensates for the instantaneous variations of the reference current components of DG units in the AC side. This control approach also addressed the DC voltage variations in the DC side of the system. Similarly, in [87] and [88], a passivity based control approach was proposed to maintain current and voltage stability in the MG’s AC and DC side respectively. Another passive control method, which included energy formation and series damping injection, was proposed in [89].
5 Conclusion and future work
Following the hierarchical control structure, this paper provides a comprehensive review of primary and secondary control in DC MGs.
The main findings of this review can be summarized as follows:
-
1)
As the basic level, primary control integrates inner control loops aiming at voltage/current regulation with the preliminary power sharing (droop control). Conventional droop control has the poor voltage regulation at heavy load and poor power sharing performance at light load condition. To overcome this, different droop characteristics including adaptive, inversed, non-linear droop, dead-band droop are presented and elaborated.
-
2)
As a higher level, secondary control improves the power sharing accuracy and meanwhile enhances power quality. Depending on the availability of communication line (or peer-to-peer communication network) and centralized controller, secondary control layer is further classified into centralized, distributed and decentralized secondary control methods.
-
3)
Centralized control schemes are based on a centralized controller which communicates with all other units through dedicated DCLs. Supervisory system is deployed to realize global optimization or to determine proper operation modes for each unit in DC MGs. Centralized control offers the highest level of flexibility for achieving advanced functionalities, but renders the system suffering an inherent single point of failure (SPOF).
-
4)
Decentralised control can achieve high reliability, modularity and only depends on the local variables. It is perceived to be a highly effective methodology for mitigation of source contingencies and communication breakdown. The disadvantage is that it lacks of global information of the network indicating difficulty in system optimization.
-
5)
Distributed control methods (e.g., DC bus signaling, MAS including dynamic consensus, gossip algorithms are discussed) can achieve similar functions as centralized methods but eliminates the SPOF. They collectively gather data among themselves and process it either through consensus-based or gossip algorithms. In general, distributed control has enhanced reliability compared to centralized control, since there is no SPOF. However, rigorous mathematical analysis of distributed control strategies remains a challenge. The proper selection of the communication step-size and convergence time is critical.
Considering the future work, distributed control strategies need to continue developing. From the standpoint of control protocols, diffusion algorithms [90] can be a good candidate given the better performance over consensus in terms of the convergence speed and mean stability of the distributed network. Also, successful laboratory scale experimental demonstrations are inevitable steps forward before commercialization.
References
Eghtedarpour N, Farjah E (2014) Power control and management in a hybrid AC/DC microgrid. IEEE Trans Smart Grid 5(3):1494–1505
Hatziargyriou N, Asano H, Iravani R et al (2007) Microgrids. IEEE Power Energy Mag 5(4):78–94
Chen SM, Liang TJ, Hu KR (2013) Design, analysis, and implementation of solar power optimizer for DC distribution system. IEEE Trans Power Electron 28(4):1764–1772
Rocabert J, Luna A, Blaabjerg F et al (2012) Control of power converters in AC microgrids. IEEE Trans Power Electron 27(11):4734–4749
Liu J, Zhang W, Rizzoni G (2018) Robust stability analysis of DC microgrids with constant power loads. IEEE Trans Power Syst 33(1):851–860
Gao F, Bozhko SB, Costabeber A et al (2017) Control design and voltage stability analysis of a droop-controlled electrical power system for more electric aircraft. IEEE Trans Ind Electron 64(12):9271–9281
Ciezki J, Ashton R (2000) Selection and stability issues associated with a navy shipboard DC zonal electric distribution system. IEEE Trans Power Del 15(2):665–669
Olivares DE, Mehrizi-Sani A, Etemadi AH et al (2014) Trends in microgrid control. IEEE Trans Smart Grid 5(4):1905–1919
Bidram A, Davoudi A (2012) Hierarchical structure of microgrids control system. IEEE Trans Smart Grid 3(4):1963–1976
Li C, Chaudhary SK, Savaghebi M et al (2017) Power flow analysis for low-voltage AC and DC microgrids considering droop control and virtual impedance. IEEE Trans Smart Grid 8(6):2754–2764
Zhang Y, Li YW (2017) Energy management strategy for supercapacitor in droop-controlled DC microgrid using virtual impedance. IEEE Trans Power Electron 32(4):2704–2716
Meng L, Dragicevic T, Vasquez JC et al (2015) Tertiary and secondary control levels for efficiency optimization and system damping in droop controlled DC-DC converters. IEEE Trans Smart Grid 6(6):2615–2626
Li C, Bosio F, Chen F et al (2017) Economic dispatch for operating cost minimization under real time pricing in droop controlled DC microgrid. IEEE J Emerg Sel Topics Power Electron 5(1):587–595
Hu J, Duan J, Ma H et al (2018) Distributed adaptive droop control for optimal power dispatch in DC microgrid. IEEE Trans Ind Electron 65(1):778–789
Nutkani IU, Wang P, Loh PC et al (2014) Cost-based droop scheme for DC microgrid. In: Proceedings of 2014 IEEE 2014 energy conversion congress and exposition (ECCE), Pittsburgh, USA, 14–18 September 2014, pp 765–769
Moayedi S, Davoudi A (2017) A novel cloud-based platform for implementation of oblivious power routing for clusters of microgrids. IEEE Access 5:607–619
Amini MH, Boroojeni KG, Dragičević T et al (2017) A comprehensive cloud-based real-time simulation framework for oblivious power routing in clusters of DC microgrids. In: Proceedings of IEEE second international conference on DC microgrids (ICDCM), Nuremburg, Germany, 27–29 June 2017, pp 270–273
Lakshmi M, Hemamalini S (2018) Nonisolated high gain DC-DC converter for DC microgrids. IEEE Trans Ind Electron 65(2):1205–1212
Chen F, Burgos R, Boroyevich D (2016) Output impedance comparison of different droop control realizations in DC systems. In: Proceedings of IEEE 17th workshop on control and modeling for power electronics, Trondheim, Norway, 27–30 June 2016, pp 1–6
Guerrero JM, Chandorkar M, Lee TL et al (2013) Advanced control architectures for intelligent microgrids—part I: decentralized and hierarchical control. IEEE Trans Ind Electron 60(4):1254–1262
Gao F, Bozhko S, Costabeber A et al (2017) Comparative stability analysis of droop control approaches in voltage source converters-based DC microgrids. IEEE Trans Power Electron 32(3):2395–2415
Rouzbehi K, Miranian A, Luna A et al (2014) DC voltage control and power sharing in multiterminal DC grids based on optimal DC power flow and voltage-droop strategy. IEEE J Emerg Sel Topics Power Electron 2(4):1171–1180
Lu X, Guerrero JM, Sun K et al (2014) An improved droop control method for DC microgrids based on low bandwidth communication with DC bus voltage restoration and enhanced current sharing accuracy. IEEE Trans Power Electron 29(4):1800–1812
Beerten J, Belmans R (2013) Analysis of power sharing and voltage deviations in droop-controlled DC grids. IEEE Trans Power Syst 28(4):4588–4597
Xu G, Shang DS, Liao XZ (2015) Decentralized inverse-droop control for input-series-output-parallel DC-DC converters. IEEE Trans Power Electron 30(9):4621–4625
Chen F, Burgos R, Boroyevich D et al (2015) A nonlinear droop method to improve voltage regulation and load sharing in DC systems. In: Proceedings of IEEE first international conference on DC microgrids (ICDCM), Atlanta, USA, 7–10 June 2015, pp 45–50
Prabhakaran P, Goyal Y, Agarwal V (2018) Novel nonlinear droop control techniques to overcome the load sharing and voltage regulation issues in DC microgrid. IEEE Trans Power Electron 33(5):4477–4487
Gao F, Yeoh S, Bozhko S et al (2015) Coordinated control of a DC electrical power system in the more electric aircraft integrated with energy storage. In: Proceedings of IEEE energy convers. congress expo, Montreal, Canada, 20–24 September 2015, pp 5431–5438
Jin C, Wang P, Xiao J et al (2014) Implementation of hierarchical control in DC microgrids. IEEE Trans Ind Electron 61(8):4032–4042
Kim J, Choi H, Cho BH (2002) A novel droop method for converter parallel operation. IEEE Trans Power Electron 17(1):25–32
Kakigano H, Miura Y, Ise T (2013) Distribution voltage control for DC microgrids using fuzzy control and gain-scheduling technique. IEEE Trans Power Electron 28(5):2246–2258
Lu X, Sun K, Guerrero JM et al (2014) State-of-charge balance using adaptive droop control for distributed energy storage systems in DC microgrid applications. IEEE Trans Ind Electron 61(6):2804–2815
Ho H, Chen K (2007) Improved current sharing performance by dynamic droop scaling technique in multiple power systems. In: Proceedings of IEEE 30th power electronic specialists conference, Orlando, USA, 17–21 June 2007, pp 189–193
Khorsandi A, Ashourloo M, Mokhtari H (2014) A decentralized control method for a low-voltage DC microgrid. IEEE Trans Energy Convers 29(4):793–801
Chaudhuri NR, Chaudhuri B (2013) Adaptive droop control for effective power sharing in multi-terminal DC (MTDC) grids. IEEE Trans Power Syst 28(1):21–29
Augustine S, Mishra MK, Lakshminarasamma N (2015) Adaptive droop control strategy for load sharing and circulating current minimization in low-voltage standalone DC microgrid. IEEE Trans Sustain Energy 6(1):132–141
Diaz NL, Dragičević T, Vasquez JC et al (2014) Intelligent distributed generation and storage units for DC microgrids-a new concept on cooperative control without communications beyond droop control. IEEE Trans Smart Grid 5(5):2476–2485
Gu Y, Xiang X, Li W et al (2014) Mode-adaptive decentralized control for renewable DC microgrid with enhanced reliability and flexibility. IEEE Trans Power Electron 29(9):5072–5080
Maknouninejad A, Qu Z, Lewis FL et al (2014) Optimal, nonlinear, and distributed designs of droop controls for DC microgrids. IEEE Trans Smart Grid 5(5):2508–2516
Dragicevic T, Vasquez JC, Guerrero JM et al (2014) Supervisory control of an adaptive-droop regulated DC microgrid with battery management capability. IEEE Trans Power Electron 29(2):695–706
Guerrero JM, Vasquez JC, Matas J et al (2011) Hierarchical control of droop-controlled AC and DC microgrids—a general approach toward standardization. IEEE Trans Ind Electron 58(1):158–172
Savaghebi M, Jalilian A, Vasquez JC et al (2012) Secondary control for voltage quality enhancement in microgrids. IEEE Trans Smart Grid 3(4):1893–1902
Ahumada C, Cardenas R, Saez D et al (2016) Secondary control strategies for frequency restoration in islanded microgrids with consideration for communication delays. IEEE Trans Smart Grid 7(6):1430–1441
Sahoo SK, Sinha AK, Kishore NK (2018) Control techniques in AC, DC, and hybrid AC-DC microgrid: a review. IEEE J Emerg Sel Topics in Power Electron 6(2):738–759
Wang B, Sechilariu M, Locment F (2012) Intelligent DC microgrid with smart grid communications: control strategy consideration and design. IEEE Trans Smart Grid 3(4):2148–2156
Dragicevic T, Vasquez JC, Guerrero JM et al (2014) Advanced LVDC electrical power architectures and microgrids: a step toward a new generation of power distribution networks. IEEE Electrification Mag 2(1):54–65
Peyghami S, Mokhtari H, Davari P (2017) On secondary control approaches for voltage regulation in DC microgrids. IEEE Trans Ind Appl 53(5):4855–4862
Wu D, Tang F, Dragicevic T et al (2015) Coordinated control based on bus-signaling and virtual inertia for islanded DC microgrids. IEEE Trans Smart Grid 6(6):2627–2638
Cao XH, Chen JM, Yang X et al (2010) Building-environment control with wireless sensor and actuator networks: centralized versus distributed. IEEE Trans Ind Electron 57(11):3596–3605
Shafiee Q, Guerrero JM, Vasquez JC (2014) Distributed secondary control for islanded microgrids-a novel approach. IEEE Trans Power Electron 29(2):1018–1031
Lewis FL, Qu Z, Davoudi A et al (2013) Secondary control of microgrids based on distributed cooperative control of multi-agent systems. IET Gener Transmiss Distrib 7(8):822–831
Peyghami S, Mokhtari H, Loh PC et al (2016) Distributed secondary control in DC microgrids with low-bandwidth communication link. In: Proceedings of 7th power electronics, drive systems & technologies conference (PEDSTC2016), Tehran, Iran, 16–18 February 2016, pp 1–5
Lu X, Guerrero JM, Sun K et al (2014) An improved droop control method for DC microgrids based on low bandwidth communication with DC bus voltage restoration and enhanced current sharing accuracy. IEEE Trans Power Electron 29(4):1800–1812
Anand S, Fernandes BG, Guerrero JM (2013) Distributed control to ensure proportional load sharing and improve voltage regulation in low voltage DC microgrids. IEEE Trans Power Electron 28(4):1900–1913
Wang P, Lu X, Yang X et al (2016) An improved distributed secondary control method for DC microgrids with enhanced dynamic current sharing performance. IEEE Trans Power Electron 31(9):6658–6673
Yang N, Paire D, Gao F et al (2015) Compensation of droop control using common load condition in DC microgrids to improve voltage regulation and load sharing. Int J Elect Power Energy Syst 64:752–760
Oliveira TR, Sliva W, Donoso-Garcia PF (2017) Distributed secondary level control for energy storage management in DC microgrids. IEEE Trans Smart Grid 8(6):2597–2607
Gao F, Bozhko S, Wheeler P (2016) An enhanced secondary control approach for voltage restoration in the DC distribution system. In: Proceedings of SAE aerospace systems and technology conference, Hartford, USA, 27–30 September 2016, pp 1–10
Huang PH, Liu PC, Xiao W (2015) A novel droop based average voltage sharing control strategy for DC microgrids. IEEE Trans Smart Grid 6(3):1096–1106
Schonberger J, Duke R, Round SD (2006) DC-bus signaling: a distributed control strategy for a hybrid renewable nanogrid. IEEE Trans Ind Electron 53(5):1453–1460
Sun K, Zhang L, Xing Y et al (2011) A distributed control strategy based on DC bus signaling for modular photovoltaic generation systems with battery energy storage. IEEE Trans Power Electron 26(10):3032–3045
Nasirian V, Moayedi S, Davoudi A et al (2015) Distributed cooperative control of DC microgrids. IEEE Trans Power Electron 30(4):2288–2303
Morstyn T, Hredzak B, Demetriades GD et al (2016) Unified distributed control for DC microgrid operating modes. IEEE Trans Power Syst 31(1):802–812
Meng L, Zhao X, Tang F et al (2016) Distributed voltage unbalance compensation in islanded microgrids by using a dynamic consensus algorithm. IEEE Trans Power Electron 31(1):827–838
Meng L, Dragicevic T, Roldán-Pérez J et al (2016) Modeling and sensitivity study of consensus algorithm-based distributed hierarchical control for DC microgrids. IEEE Trans Smart Grid 7(3):1504–1515
Chen X, Shi M, Sun H et al (2018) Distributed cooperative control and stability analysis of multiple DC electric springs in DC microgrid. IEEE Trans Ind Electron 65(7):5611–5622
Sahoo S, Mishra S (2017) An adaptive event-triggered communication based distributed secondary control for DC microgrids. IEEE Trans Smart Grid. https://doi.org/10.1109/tsg.2017.2717936
Sahoo S, Mishra S (2017) A distributed finite-time secondary average voltage regulation and current sharing controller for DC microgrids. IEEE Trans Smart Grid. https://doi.org/10.1109/tsg.2017.2737938
Morstyn T, Hredzak B, Agelidis VG (2016) Cooperative multi-agent control of heterogeneous storage devices distributed in a DC microgrid. IEEE Trans Power Syst 31(4):2974–2986
Behjati H, Davoudi A, Lewis FL (2014) Modular DC-DC converters on graphs: cooperative control. IEEE Trans Power Electron 29(12):6725–6741
Nasirian V, Davoudi A, Lewis FL et al (2014) Distributed adaptive droop control for DC distribution systems. IEEE Trans Energy Convers 29(4):944–956
Dimakis AD, Kar S, Moura JMF et al (2010) Gossip algorithms for distributed signal processing. Proc. IEEE 98(11):1847–1864
Bolognani S, Zampieri S (2013) A distributed control strategy for reactive power compensation in smart microgrids. IEEE Trans Auto Control 58(4):2818–2833
Shafiee Q, Stefanovic C, Dragicevic T et al (2014) Robust networked control scheme for distributed secondary control of islanded microgrids. IEEE Trans Ind Electron 66(10):5365–5374
Tah A, Das D (2016) An enhanced droop control method for accurate load sharing and voltage improvement of isolated and interconnected DC microgrids. IEEE Trans Sustain Energy 7(3):1194–1204
Peyghami S, Mokhtari H, Loh PC et al (2018) Distributed primary and secondary power sharing in a droop-controlled LVDC microgrid with merged AC and DC characteristics. IEEE Trans Smart Grid 9(3):2284–2294
Gao F, Bozhko S, Asher G et al (2016) An improved voltage compensation approach in a droop-controlled DC power system for the more electric aircraft. IEEE Trans Power Electron 31(10):7369–7383
Hosseinzadeh M, Salmasi FR (2018) Fault-tolerant supervisory controller for a hybrid AC/DC microgrid. IEEE Trans Power Electron 31(10):2809–2823
Nejabatkhah F, Li YW (2015) Overview of power management strategies of hybrid AC/DC microgrid. IEEE Trans Power Electron 30(12):7072–7089
Lin P, Jin C, Xiao J et al (2018) A distributed control architecture for global system economic operation in autonomous hybrid AC/DC microgrids. IEEE Trans Smart Grid. https://doi.org/10.1109/tsg.2018.2805839
Loh PC, Li D, Chai YK et al (2013) Autonomous control of interlinking converter with energy storage in hybrid AC-DC microgrid. IEEE Trans Ind Appl 49(3):1374–1382
Gupta A, Doolla S, Chatterjee K (2018) Hybrid AC-DC microgrid: systematic evaluation of control strategies. IEEE Trans Smart Grid 9(4):3830–3843
Rodriguez-Diaz E, Palacios-Garcia EJ, Anvari-Moghaddam A et al (2017) Real time energy management for a hybrid residential microgrid. In: Proceedings of IEEE second international conference on DC microgrids (ICDCM), Nuremburg, Germany, 27–29 June 2017, pp 1–6
Li B, Chen T, Wang X et al (2017) Real-time energy management in microgrids with reduced battery capacity requirements. IEEE Trans Smart Grid. https://doi.org/10.1109/tsg.2017.2783894
Farhadi M, Mohammed OM (2015) Adaptive energy management in redundant hybrid DC microgrid for pulse load mitigation. IEEE Trans Smart Grid 6(1):54–62
Mehrasa M, Adabi ME, Pouresmaeil E et al (2014) Passivity-based control technique for integration of DG resources into the power grid. Int J Electr Power Energy Syst 58:281–290
Mehrasa M, Pouresmaeil E, Jorgensen BN et al (2015) A control plan for the stable operation of microgrids during grid-connected and islanded modes. Electr Power Syst Res 129:10–22
Pouresmaeil E, Mehrasa M, Shokridehaki MA et al (2015) Stable operation of distributed generation units in microgrid networks. In: Proceedings of the Australasian universities power engineering conference (AUPEC), Wollongong, Australia, 27–30 September 2015, pp 1–6
Mehrasa M, Pouresmaeil E, Mehrjerdi H et al (2015) Control technique for enhancing the stable operation of distributed generation units within a microgrid. Energy Conversion and Management 97:362–373
Azevedo R, Cintuglu MH, Ma T et al (2017) Multiagent-based optimal microgrid control using fully distributed diffusion strategy. IEEE Trans Smart Grid 8(4):1997–2008
Author information
Authors and Affiliations
Corresponding author
Additional information
CrossCheck date: 18 July 2018
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
GAO, F., KANG, R., CAO, J. et al. Primary and secondary control in DC microgrids: a review. J. Mod. Power Syst. Clean Energy 7, 227–242 (2019). https://doi.org/10.1007/s40565-018-0466-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40565-018-0466-5