Abstract
Control strategy of unified power flow controller (UPFC) utilizing dq decoupling control is deduced in this paper, which can closely follow the control orders of the active and reactive power. The subsynchronous resonance (SSR) characteristics of a series compensated system equipped with UPFC are studied, and the results reveal that SSR characteristics of the system may vary significantly with UPFC in service or not. Consequently, supplementary subsynchronous damping controller (SSDC) for UPFC is proposed and investigated, and the effectiveness of the proposed SSDC is verified by damping torque analysis and time domain simulations.
Similar content being viewed by others
1 Introduction
In recent years, series capacitor compensations have been widely used in China to enhance the stability and to increase the transmission capacity of the power system [1–3]. Although series capacitor compensation can provide good economical profit, the risk of SSR (Subsynchronous Resonance) could be brought to the power system at the same time [4, 5]. Meanwhile, with the rapid development of the power electronics, flexible AC transmission system (FACTS) devices are widely used in the power system [6–9]. With the ability of controlling multi electrical parameters, e.g. the bus voltage and the active/reactive power of the transmission line, unified power flow controller (UPFC) is the most versatile FACTS so far [7]. In China, the first UPFC project has already been put into service in East China Power Grid in 2015, and other UPFC projects are being planned or built.
SSR characteristics and its mitigation for series compensated power system have been adequately studied, and many research results have been published [10, 11]. However, for the problem of SSR characteristics of the power system with UPFC, very limited studies have been reported. In [12, 13], the impacts of the series voltage injected by UPFC series converter and the shunt current injected by UPFC shunt converter on the SSR characteristics have been studied. UPFC is always used to control the power flow of the system, whereas the impacts of the active and reactive power flow controlled by UPFC on the SSR characteristics have not been studied.
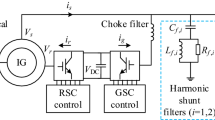
FACTS like static synchronous compensator (STATCOM) and static synchronous series compensator (SSSC) have been used to mitigate SSR in previous literatures [14–16]. Equipped with back-to-back voltage source converters (VSC), proper supplementary control of UPFC can be used to enhance the stability of the power system [17]. In addition, given that no extra expensive electrical equipment is needed, it is most promising to mitigate SSR by using UPFC supplementary control for the power system equipped with UPFC. However, few researches have been reported on using UPFC to damp SSR. Reference [18] optimized the control parameters of UPFC, and investigated the SSR damping effect of the UPFC itself. Reference [19] investigated a SSR damping controller for the shunt converter of UPFC using fuzzy control theory; however, SSR damping controller for the series converter has not been designed, and the SSR damping mechanism has not been deduced.
In this paper, the control strategy of UPFC utilizing dq decoupling control is deduced which can follow the orders of the active and reactive power of the transmission line closely. Then supplementary subsynchronous damping controllers (SSDC) for UPFC are proposed, and the SSR damping mechanism is deduced as well. Meanwhile, both the SSR characteristics of the series compensated system with UPFC and the effectiveness of the proposed SSDC are investigated by damping torque analysis and time domain simulations.
The rest of this paper is organized as follows. Section 2 proposes the control strategy of UPFC. Section 3 describes the test system used in this paper. Section 4 studies the SSR characteristics of the test system equipped with UPFC. The configuration of the SSDC for UPFC, its SSR damping mechanism as well as its damping effect are given in Sects. 5 and 6. The analysis results of the SSR characteristics and the effectiveness of the SSDC are verified by time domain simulations presented in Sect. 7. Conclusion remarks are given in Sect. 8.
2 Control strategy of UPFC
2.1 Equivalent circuit of UPFC
UPFC device consists of shunt transformer-converter, series transformer-converter and a DC capacitor. The shunt converter and series converter inject controllable voltages \(\dot{U}_{sh}\) and \(\dot{U}_{se}\) into the power system respectively [12, 20]. The single-line diagram and equivalent circuit of UPFC is shown in Appendix A.
Ignoring the loss of the converters, the voltage \(U_{dc}\) of the DC capacitor is regulated by the active power absorbed by the shunt and series converters of UPFC, and can be represented by:
where \(\dot{I}_{sh}\) and \(\dot{I}_{se}\) are the currents through the shunt converter and series converters; \(r_{sh}\) is the resistance for the terminal branch of the shunt converter.
2.2 UPFC control strategy
The shunt and series converters are controlled in dq-frames synchronized to the terminal voltages of UPFC. For the control strategy of the UPFC shunt converter, the q-axis component of the terminal voltage for shunt transformer \(\dot{U}_{1}\) is forced to zero, i.e., the d-axis and q-axis components of \(\dot{U}_{1}\) are:
Then, the active and reactive power absorbed by the shunt transformer of UPFC can be represented by:
Equation (3) indicates that \(P_{sh}\) and \(Q_{sh}\) can be controlled by \(I_{shd}\) and \(I_{shq}\) independently. Hence, the amplitude of \(U_{1}\) can be controlled by regulating \(I_{shq}\). Meanwhile, according to (1) and (3), the DC voltage \(U_{dc}\) can be controlled by regulating \(I_{shd}\).
Similarly, for the control strategy of the UPFC series converter, the q-axis component of the terminal voltage for series transformer \(\dot{U}_{2}\) is forced to zero, i.e., the d-axis and q-axis components of \(\dot{U}_{2}\) are:
Consequently, the active and reactive power flow of the transmission line can be expressed by:
According to (5), the active power \(P_{se}\) and reactive power \(Q_{se}\) of the transmission line can be controlled by regulating \(I_{sed}\) and \(I_{seq}\) independently.
Meanwhile, the voltage equations for the terminal branches of the shunt and series converters can be obtained:
where \(r_{sh}\) and \(L_{sh}\) are the resistance and reactance for the terminal branch of the shunt converter; \(r_{se1}\) and \(L_{se1}\) are the resistance and reactance for the terminal branch of the series converter; \(\omega_{s}\) is the angular frequency of the power system.
Therefore, based on (1) to (7), the control strategy of the UPFC shunt and series converters can be deduced and given in Fig. 1.

Control block diagram of UPFC converters
3 Test system
A power system equipped with UPFC is studied in this paper, whose configuration is shown in Fig. 2. The power plant contains two identical turbine generator units rated 2×667 MVA. Two transmission lines are used to connect this power plant to the far away equivalent power system, and Line1 is series compensated.

Single-line diagram of the series compensated power system equipped with UPFC
The shaft of the generator unit is modeled by the lumped masses spring system with four sections which are HIP, LPA, LPB and GEN respectively. The frequencies of the torsional modes are given in Table 1.
To research the SSR characteristics and its mitigation in different system configurations, the following two operating conditions are chosen as examples.
- Case 1::
-
Line 1 is in service, whereas Line 2 is out of service.
- Case 2::
-
Both Line 1 and Line 2 are in service.
4 SSR characteristics of the system with UPFC
Damping torque analysis is performed to analyze the SSR characteristics of the test system. In damping torque analysis, the system is assumed to be stable if the net damping torque at any of the SSR mode frequencies is positive. The damping torque due to the external system is the component of the electrical torque \(T_{e}\) in phase with the generator rotor speed \(\omega_{G}\), and can be expressed by [13, 21]:
where \(T_{De}\) is damping torque at frequency \(\xi\), and \(\Delta\) represents the small deviation of a variable.
In Case 1, the series converter of UPFC is out of service, i.e., the UPFC is performing just like a STATCOM. The damping torque of the generator with the UPFC shunt converter in service or not is given in Fig. 3a. It can be found that severe negative damping exists around the frequency of Mode 3 (27.74 Hz), which may lead to unstable SSR. Meanwhile, the damping torques around the frequencies of Modes 1, 2 and 3 are almost the same whether the UPFC shunt converter is in service or not.

Damping torque of the generator
In Case 2, to evaluate the impacts of the UPFC on the SSR characteristics of this system, damping torque analysis is performed with the UPFC in service or not, and variable active and reactive power are transferred by Line 2 when UPFC is in service. The damping torque of the generator is given in Fig. 3b. This figure shows that severe negative damping exists around the frequency of Mode 2 (22.72 Hz) when the series converter of UPFC is out of service, whereas the band with severe negative damping changes to around the frequency of Mode 3 (27.74 Hz) when the series converter of UPFC is in service. Therefore, the shunt transformer-converter of UPFC has little impact on the SSR characteristics of the system, whereas the series transformer-converter of UPFC affects the SSR characteristics significantly. Meanwhile, the results given in Fig. 3b also reveal that the damping torque varies very little when UPFC transfers variable active and reactive power.
Hence, SSR characteristics of the power system may vary significantly in different cases when UPFC is in service or not. To ensure the security and the stability of the system, countermeasures for multi-mode SSR mitigation must be designed.
5 Supplementary control of UPFC to mitigate SSR
5.1 Configuration of SSDC
To damp SSR by generating supplementary subsynchronous damping torque, currents of corresponding frequency should be injected into the armature windings of the generator. As shown in Fig. 1, inner current control loops are existed in UPFC converters, thus the supplementary subsynchronous damping signal can be superimposed on the order of the inner current control loop for the UPFC converters.
As shown in Fig. 1, given that maintaining a constant DC voltage \(U_{dc}\) is essential for UPFC operating, thus to minimize the impacts of the supplementary subsynchronous damping signal on the UPFC operating during transient state, the supplementary subsynchronous damping signal for shunt converter \(I_{damp\_sh}\) is superimposed on the AC voltage control loop instead of the DC voltage control loop. Meanwhile, to minimize the power oscillation caused by the supplementary subsynchronous damping signal during transient state, the supplementary subsynchronous damping signal for series converter \(I_{damp\_se}\) is superimposed on the reactive power control loop instead of the active power control loop.
The control block diagram of SSDC for UPFC is given in Fig. 4, where \(\Delta \omega_{Gen}\) is the speed deviation of the GEN mass of the generator unit. To mitigate multi-mode SSR, there are separated control paths for each mode in SSDC.

Control block diagram of SSDC for UPFC
As shown in Fig. 4, for the control loop of Mode i, the Mode i component of \(\Delta \omega_{Gen}\) is extracted by modal filter i, and imposed by proper gain and phase shift. Assuming that the amplitude and the phase of the mode i component of \(\Delta \omega_{Gen}\) are \(A_{i}\) and \(\varphi_{i}\) respectively, then supplementary subsynchronous damping signal for Mode i can be expressed by:
where \(\omega_{i}\) is the angular frequency of Mode i, \(k_{i}\) and \(\theta_{i}\) are the gain and the phase shift of the SSDC imposed on Mode i respectively.
If SSR is stable, i.e. \(A_{i} = 0\), the output of the SSDC would be:
Equation (10) reveals that the output of the SSDC would be zero if SSR is stable, i.e., the proposed SSDC has none undesirable effect on UPFC or the system under steady-state operation.
5.2 Supplementary subsynchronous torque of SSDC
The output currents of the UPFC converters can follow the orders of the inner current control loops closely. Therefore, in the dq-frames used for the shunt and series converters’ control, the output subsynchronous currents of the shunt and series converters for Mode i can be represented by:
where \(T_{sh}\) and \(T_{se}\) are the lag-times of the shunt and series converters respectively.
As shown in Fig. 2, for the UPFC installed at the high-voltage bus of the power plant, the equivalent circuit for the subsynchronous current injected by UPFC shunt converter can be represented by Fig. 5a.

Equivalent circuit and phase relationship of the subsynchronous current injected by UPFC shunt converter
In Fig. 5a, the subsynchronous current extracted by the UPFC shunt converter from the armature windings of the generator can be represented by:
where \(G_{ish}\) and \(\phi_{ish}\) are the gain and the phase shift imposed by the shunt converter and the power system on Mode i.
The phase relationship between the subsynchronous current \(I_{gen\_shi}\) and the voltage of the generator terminal node \(U_{G}\) is shown in Fig. 5b, where \(\delta_{1}\) is the phase angle between \(U_{1}\) and \(U_{G}\). Hence, the supplementary subsynchronous torque produced by SSDC of the shunt converter is:
where \(\omega_{G}\) is the speed of the generator, and \(\omega_{G} \approx 1\;{\text{p}} . {\text{u}} .\) under quasi-stable state. Hence, (13) can be rewritten as:
Similarly, the supplementary subsynchronous torque produced by SSDC of the series converter is:
where \(G_{ise}\) and \(\phi_{ise}\) are the gain and the phase shift imposed by the series converter and the power system on Mode i, and \(\delta_{2}\) is the phase angle between \(U_{2}\) and \(U_{G}\).
According to the supplementary subsynchronous torques given in (14) and (15), SSR problem can be mitigated effectively by tuning \(k_{i}\) and \(\theta_{i}\) of the SSDCs to produce supplementary subsynchronous torque large enough.
6 SSR mitigation using SSDC
The SSDC are tuned by trial-and-error approach in this paper. Damping torque analysis is performed with the SSDC in service, and the results are presented as follows.
In Case 1, when the SSDC of the shunt converter(SSDCsh) is in service, the damping torque of the generator is given in Fig. 6a. This figure reveals that the damping torques around the frequencies of Modes 1, 2 and 3 are all positive with the SSDC of the UPFC shunt converter in service, i.e. the SSDC mitigates the SSR effectively.

Damping torque of the generator with SSDC
In Case 2, when the SSDCsh and/or the SSDC of the series converter (SSDCse) are in service, the damping torque of the generator is given in Fig. 6b. This figure suggests that Modes 1, 2 and 3 are all stable with the SSDC of the shunt converter and/or the SSDC of the series converter in service. Meanwhile, this figure also reveals that the damping is much stronger with the both SSDCs in service.
7 Time-domain simulation verification
Small signal simulations are performed using PSCAD/EMTDC for the test system with the full scale detailed model.
7.1 SSR characteristics of the system without SSDC
In Case 1 and Case 2, the shunt converter is put into service in initial state and trips at 5 s. The speed deviation and the shaft torques of the generator are given in Fig. 7a, b. The results reveal that there are unstable SSR in the both cases. Then, the time-frequency analysis of the speed deviations is carried out to peer into the simulation results, and the results are given in Fig. 7c, d. Figure 7c shows that Modes 1 and 2 are stable whereas Mode 3 is unstable in Case 1. Figure 7d shows that Modes 1 and 3 are stable whereas Mode 2 is unstable in Case 2. Meanwhile, Fig. 7 also suggests that the divergence rate of the unstable mode remains unchanged whether the shunt converter is in service or not in the corresponding cases.

Speed deviation and shaft torques of the generator without SSDC
In Case 2, the shunt converter is put into service in initial state, and the series transformer-converter is put into operation at 5 s. The speed deviation and the shaft torques of the generator are given in Fig. 8. The results reveal that there are unstable SSR in this system whether the series transformer-converter is in service or not. Meanwhile, Fig. 8b suggests that Mode 2 is unstable in initial state whereas Mode 3 becomes unstable once the series transformer-converter is put into service.

Speed deviation and shaft torques of the generator under Case 2 without SSDC
In Case 2, simulations are also performed with variable orders of the active/reactive power for UPFC, and the simulation results are given in Appendix B. The results reveal that there is unstable SSR in this case, and the divergence rate remains unchanged with variable active and reactive power transferred by UPFC. Meanwhile, the results also suggest that UPFC regulates the DC voltage and AC voltage effectively, and follows the orders of the active and reactive power closely.
7.2 SSR mitigation utilizing SSDC
In Case 1, the shunt converter is put into service in initial state, and SSDC of the shunt converter is put into service at 4 second. The simulation results of the generator shaft and UPFC are given in Fig. 9. Figure 9a suggests that the system is stable with the SSDC of the shunt converter in service.

Simulation result of the system under Case1 with SSDC of shunt converter
In Case 2, the UPFC is put into service in initial state, and the SSDCs of the series and shunt converters are put into service at 4 s. The simulation results of the generator shaft and UPFC are given in Fig. 10. Figure 10a reveals that the SSDCs of the series and shunt converters can damp the SSR effectively.

Simulation result of the system under Case 2 with SSDCs of shunt and series converters
Meanwhile, Figs. 9b, 10b suggests that the SSDC of the shunt converter and/or the SSDC of the series converter have none undesirable effect on the UPFC or the system under steady-state operation.
In Case 2, the UPFC is put into service in initial state, and either the SSDC of the series converter or the SSDC of the shunt converter is put into service at 4 second, the simulation results are given in Appendix B. Comparing Fig. 10 with Appendix B, it can be concluded that the damping with both SSDCs in service is much stronger than the damping with just one SSDC in service.
Simulation results presented above verify the damping torque analysis results well, and show that the SSDC proposed in this paper can mitigate SSR effectively.
8 Conclusion
A control strategy of UPFC in dq-frames synchronized to the UPFC terminal voltages is deduced and proposed in this paper, which can follow the orders of the active and reactive power of the transmission line closely. The SSR characteristics of a series compensated power system equipped with UPFC are studied. The results demonstrate that the shunt converter and the active/reactive power transferred by the UPFC have little impact on the SSR characteristics of the system, whereas the series transformer-converter may affects the SSR characteristics significantly. Then, SSDC for UPFC is proposed, analyzed and investigated for the first time. The results of damping torque analysis and time domain simulation suggest that the proposed SSDC for UPFC can mitigate SSR effectively, and have none undesirable effect on the UPFC or the power system under steady-state operation. The proposed SSDC for the UPFC added an additional advantage of existing UPFC, which drives to optimal cost solution for the problem of SSR.
References
Qu WH, Jiang JG, Zhao Q et al (2016) Subsynchronous oscillation and its practical mitigation project at the Hulun Buir power plant generating for a Chinese extra-high-voltage AC and DC hybrid transmission network. IET Gener Transm Distrib 10(4):949–954
Zhu XY, Sun HS, Wen JY et al (2014) Improved complex torque coefficient method using CPCM for multi-machine system SSR analysis. IEEE Trans Power Syst 29(5):2060–2068
Xie XR, Liu P, Bai K et al (2013) Applying improved blocking filters to the SSR problem of the Tuoketuo power system. IEEE Trans Power Syst 28(1):227–235
Subsynchronous Resonance Working Group (1992) Reader’s guide to subsynchronous resonance. IEEE Trans Power Syst 7(1):150–157
Anderson PM, Agrawal BL, Vaness JE (1990) Subsynchronous resonance in power system. IEEE Press, New York
Ramey DG, Kimmel DS, Dorney JW et al (1981) Dynamic stabilizer verification tests at the San Juan station. IEEE Trans Power Appar Syst 100(12):5011–5019
Yuan YB, Li P, Kong XP et al (2016) Harmonic influence analysis of unified power flow controller based on modular multilevel converter. J Mod Power Syst Clean Energy 4(1):10–18. doi:10.1007/s40565-015-0175-2
Zhu XY, Sun HS, Wen JY et al (2014) A practical method to construct network state equations in multi-machine system SSR study. Electr Power Syst Res 107:51–58
Xie XR, Wang L, Han YD (2016) Combined application of SEDC and GTSDC for SSR mitigation and its field tests. IEEE Trans Power Syst 31(1):769–776
Adrees A, Milanović JV (2016) Optimal compensation of transmission lines based on minimisation of the risk of subsynchronous resonance. IEEE Trans Power Syst 31(2):1038–1047
Xu Z, Feng ZY (2000) A novel unified approach for analysis of small-signal stability of power systems. In: IEEE power engineering society winter meeting, Singapore, 23–27 Jan 2000
Padiyar KR, Prabhu N (2005) Investigation of SSR characteristics of unified power flow controller. Electr Power Syst Res 74(2):211–221
Thirumalaivasan R, Prabhu N, Janaki M et al (2013) Analysis of subsynchronous resonance with generalized unified power flow controller. Electr Power Energy Syst 53:623–631
Xie XR, Zhang YQ, Li ZP (2013) Damping multimodal subsynchronous resonance using a generator terminal subsynchronous damping controller. Electr Power Syst Res 99:1–8
Padiyar KR, Prabhu N (2006) Design and performance evaluation of subsynchronous damping controller with STATCOM. IEEE Trans Power Deliv 21(3):1398–1405
Thirumalaivasan R, Janaki M, Prabhu N (2013) Damping of SSR using subsynchronous current suppressor with SSSC. IEEE Trans Power Syst 28(1):64–74
Tambey N, Kothari ML (2003) Damping of power system oscillations with unified power flow controller (UPFC). IEE Proc Gener Transm Distrib 150(2):129–140
Alharbi YM, Siada AA, Abdou AF (2013) Application of UPFC on stabilizing torsional oscillations and improving transient stability. In: 2013 Australasian universities power engineering conference, Hobart, 29 Sep–3 Oct 2013
Hosseini H, Boudaghi A, Mehri A et al (2012) Mitigating SSR in hybrid system with steam and wind turbine by UPFC. In: Proceedings of 17th conference on electrical power distribution networks, Tehran, 2–3 May 2012
Bruno S, Tuglie ED, Scala ML et al (2001) Dynamic security corrective control by UPFCs. IEEE Trans Power Syst 16(2):490–497
Canay IM (1982) A novel approach to the torsional interaction and electrical damping of the synchronous machine Part I: Theory. IEEE Trans Power Appar Syst 101(10):3630–3638
Acknowledgment
This work was supported by National Natural Science Foundation of China (No. 51607092), and State Grid Corporation of China (SGCC)’s Major Science and Technology Demonstrative Project of UPFC in West Nanjing Power Grid (No. SGCC-2015-011).
Author information
Authors and Affiliations
Corresponding author
Additional information
CrossCheck date:8 February 2017
Appendices
Appendix A
The single-line diagram and equivalent circuit of UPFC is expressed by Fig. A1.

Single-line diagram and equivalent circuit of UPFC
Appendix B
In Case 2, when SSDC is out of service, UPFC is put into service with the orders of the active and reactive power been set to zero in initial state; the order of the active power steps to 400 MW at 5 s, and the order of the reactive power steps to 200 MVar at 10 second. The simulation results of the generator shaft and UPFC are given in Fig. B1.

Simulation result of the system under Case2 without SSDC
In Case 2, the UPFC is put into service in initial state, and either the SSDC of the series converter or the SSDC of the shunt converter is put into service at 4 second, the simulation results are given in Fig. B2.

Simulation results of the system under Case2 with either the SSDC of the series converter or the SSDC of the shunt converter
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
ZHU, X., JIN, M., KONG, X. et al. Subsynchronous resonance and its mitigation for power system with unified power flow controller. J. Mod. Power Syst. Clean Energy 6, 181–189 (2018). https://doi.org/10.1007/s40565-017-0283-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40565-017-0283-2