
Abstract
A reasonable islanding strategy of a power system is the final resort for preventing a cascading failure and/or a large-area blackout from occurrence. In recent years, the applications of wide area measurement systems (WAMS) in emergency control of power systems are increasing. Therefore, a new WAMS-based controlled islanding scheme for interconnected power systems is proposed. First, four similarity indexes associated with the trajectories of generators are defined, and the weights of these four indexes are determined by using the well-developed entropy theory. Then, a coherency identification algorithm based on hierarchical clustering is presented to determine the coherent groups of generators. Secondly, an optimization model for determining controlled islanding schemes based on the coherent groups of generators is developed to seek the optimal cutset. Finally, a 16-generator 68-bus power system and a reduced WECC 29-unit 179-bus power system are employed to demonstrate the proposed WAMS-based controlled islanding schemes, and comparisons with existing slow coherency based controlled islanding strategies are also carried out.
Similar content being viewed by others

1 Introduction
Due to the ever-increasing energy demand, power systems are now operating closer to their operation limits, and the growing complexity of power systems and the inevitable uncertainties in power system operation introduced by fast penetration of renewable stochastic generation (such as wind and solar) increase the possibility of power system failures [1, 2]. Power system islanding [3–5] is one of the solutions to preventing cascading failures and/or wide-area blackouts, which could maintain the stability of power systems under contingencies [6].
Several methods have been proposed to split a power system into several islands [7–12], and some controlled islanding schemes are based on the coherent groups of generators in a given power system. In [11], the weak coupling among generators is employed to cluster the generators with slow coherency, and then the spectral clustering scheme presented to split the power system into controlled islands. An integrated WAMS-based adaptive controlled islanding scheme is presented, in which the improved Laplacian eigenmap algorithm is employed to identify the coherent generators [12]. An identification algorithm of the controlling group of generators is presented and a new power system islanding scheme is proposed based on the unified stability control framework in [13]. In [14], two wide-area protection schemes both on synchrophasor measurements are presented for controlled islanding of the Uruguayan electrical power system. An approach for identifying coherent generators of power systems is presented in [15] by using spectrum analysis of the generators velocity variations. In [16], an algorithm based on principal component analysis is presented for identifying coherent generators of an interconnected power system by using the measured data sets of generator speeds and bus angles. In [17], the independent component analysis method is applied for coherency identification of interconnected power systems with WAMS. The Fourier analysis method is proposed in [18] to identify the coherent groups of generators by analyzing the generator speed sets measured by WAMS. In [19], a method based on non-negative matrix factorization is presented to identify the coherent generators from the measured high-dimensional generator speeds. A new unified synchrophasor-based controlled separation scheme, which is strategically implemented in three time stages (i.e., offline analysis stage, online monitoring stage and real-time control stage) is proposed, and the synchrophasors are employed to study “where” and “when” to island [20]. In [21], two islanding detection methods based on bus voltage phase angles and frequencies measured by a frequency monitoring network (FNET) is presented and applied to the North American power grid.
Based on the above survey, it can be seen that the current research publications on power system islanding schemes mainly focus on the islanding methods or algorithm based on the given power system topology and the coherency identification methods or algorithms based on the measured generator speeds or bus angles. However, the swing curves of generators after a disturbance consist of many swing parameters, such as generator angles, speeds and swing directions, so there should be many hidden characteristics to be investigated. Thus, all the generator angles, speeds and swing directions of swing generator curves should be fully considered in the identification of coherent generator groups.
Therefore, a comprehensive study on the swing curves of generators measured by the WAMS is performed in this paper. First, four indexes, i.e., the angle deviation similarity, swing direction similarity, rotating speed deviation similarity, and corner deviation similarity, are defined for identifying the coherency of generators based on the swing curves or trajectories of generators. Then, four indexes are combined into a synthesized index by using the entropy weight theory, which could take most of the characteristics of generator trajectories into consideration in identifying the coherent generator groups. For a given power system, each generator can be considered as a cluster, and the generators with highest coherency can be clustered into one group. Thus, the agglomerative method of the hierarchical clustering which could be used to build a hierarchy of clusters is employed to identify the coherent groups of generators. Then, the optimization model of controlled islanding schemes based on the coherent group of generators is developed to seek the optimal cutset. Finally, a 16-generator 68-bus power system and the reduced WECC 29-unit 179-bus power system are used for demonstrating the effectiveness of the proposed WAMS-based islanding schemes.
2 Coherency identification of generators
Given a set of trajectories T = {T r1, T r2, T r3,…, T rm , …, T rM } (1 ≤ m ≤ M) of all generators in a given power system, which is measured by phase measurement units (PMUs) with a fixed time interval. An angle or speed trajectory T rm of one generator is defined as a sequence of multi-dimensional points. M is the total number of the generators in the power system. T ri = {P m,1, P m,2, P m,3, …, P m,n , …, P m,N } (1 ≤ n ≤ N), where P m,n is the n th sampling point of the m th generators measured by PMUs and represented by a point (T n , \(\delta_{m,n}\) or \(\omega_{m,n}\)) on the coordinate axis. N is the total number of the sampling points; T n is the time of the n th sampling point; \(\delta_{m,n}\) and \(\omega_{m,n}\) are the generator angle and rotating speed of the m th generator measured by PMUs at the n th sampling point (i.e. T n ), respectively.
2.1 Trajectory similarity for coherency identification
In this section, four indexes for identifying the coherency of generators are introduced [22].
-
1)
Angle deviation similarity
The angle deviations between any two generators are widely employed to determine the coherency of generators in actual power systems. Therefore, it should be considered in selecting the indexes for identifying the coherency of generators. The angle deviation similarity is defined to reflect the relative distance between any two angle trajectories. Thus, the index of the angle deviation similarity between the i th and j th generators can be formulated as
where \(\delta_{i,n}\) and \(\delta_{j,n}\) are the angles of the i th and j th generators at the sampling point n; \(\delta_{i,1}\) and \(\delta_{j,1}\) are the angles of the i th and j th generators at the starting sampling point. It can be seen that I L(i, j) could well measure the deviation between the i th and j th angle trajectories.
-
2)
Swing direction similarity
The swing direction similarity is used to reflect the deviation degree of the overall swing directions between the i th and j th generator angle trajectories. The index of swing direction similarity between generator i and generator j is formulated as
where \(\overrightarrow {{P_{i,1} P_{i,N} }}\) and \(\overrightarrow {{P_{j,1} P_{j,N} }}\) are the vectors from the starting sampling point (T 1, \(\delta_{i,1}\)) to the ending sampling point (T N , \(\delta_{i,N}\)) of the i th and j th generator trajectories.
-
3)
Rotating speed deviation similarity
When a disturbance occurs in a power system, the power flow will be redistributed and then the generation outputs will change. Then the rotating speeds of generators will be increased or decreased. The rotating speed deviation between the measured speed and the synchronized speed should be considered in the coherency identification. With the rotating speed deviation considered, it would be helpful to identify the coherency of generators quickly and correctly. Thus, the rotating speed deviation similarity is defined as an index to check the difference between the ith and jth speed trajectories of generators, which is represented as
where \(\omega_{i,n}\) and \(\omega_{j,n}\) are the rotating speed of the i th and j th generators at the sampling point n.
-
4)
Corner deviation similarity
For a power system under disturbances, the angles of different generators will oscillate towards different direction, which will impact on the coherency of generators. So the inner direction changes of angle trajectories at different sampling points should be considered. The inner direction changes of an angle trajectory can be represented by the angle deviation of two neighboring sampling intervals, and is denoted as
where \(\overrightarrow {{P_{i,n - 1} P_{i,n} }}\) and \(\overrightarrow {{P_{i,n} P_{i,n + 1} }}\) are the vectors from the sampling points (T n−1, \(\delta_{i,n - 1}\)) and (T n , \(\delta_{i,n}\)) to the sampling points (T n , \(\delta_{i,n}\)) and (T n+1, \(\delta_{i,n + 1}\)) of the i th generator trajectory. If \(\delta_{i,n + 1} - \delta_{i,n} \ge \delta_{i,n} - \delta_{i,n - 1}\) (i.e. \(\delta_{i,n - 1} + \delta_{i,n + 1} \ge 2\delta_{i,n}\)), \(\theta_{i,n}\) is a positive value of the intersection angle of vectors \(\overrightarrow {{P_{i,n - 1} P_{i,n} }}\) and \(\overrightarrow {{P_{i,n} P_{i,n + 1} }}\); otherwise, \(\theta_{i,n}\) is a negative value of the intersection angle of vectors \(\overrightarrow {{P_{i,n - 1} P_{i,n} }}\) and \(\overrightarrow {{P_{i,n} P_{i,n + 1} }}\).
Based on the above inner direction changes of the angle trajectories, an index for reflecting the corner deviation similarity of two angle trajectories can be defined to measure the difference of internal oscillation degree between the i th and j th generators. The index of corner deviation similarity is represented as
where \(\theta_{i,n}\) and \(\theta_{j,n}\) are inner direction changes of the i th and j th angle trajectories at the sampling point n.
It can be seen from the definition of four similarity indexes that there are four index values for each pair of generators, and these four indexes will reflect the coherency of generators to some extent. Given a power system with M generators, there exist four M×M matrices for all generators, which are I L, I D, I S and I C where \({\varvec{I}}_{\text{L} } = [I_{\text{L} } (i,j)]_{M \times M}\), \(\varvec{I}_{\text{D} } = [I_{\text{D} } (i,j)]_{M \times M}\), \(\varvec{I}_{\text{S} } = [I_{\text{S} } (i,j)]_{M \times M}\) and \(\varvec{I}_{\text{C} } = [I_{\text{C} } (i,j)]_{M \times M}\). It can be seen that all the matrices of four indexes are symmetric matrices, and all their diagonal elements are equal to zero.
It can be seen from (1)–(3) and (5) that four similarity indexes cannot be compared with each other directly because they have different measurement units. So these four indexes should be normalized before integrating them. The four matrices are translated to \(\varvec{I}_{\text{L}}^{\prime } = [I_{\text{L}}^{\prime } (i,j)]_{M \times M} ,\) \(\varvec{I}_{\text{D}}^{\prime } = [I_{\text{D}}^{\prime } (i,j)]_{M \times M} ,\) \(\varvec{I}_{\text{S}}^{\prime } = [I_{\text{S}}^{\prime } (i,j)]_{M \times M} ,\) \(\varvec{I}_{\text{C}}^{\prime } = [I_{\text{C}}^{\prime } (i,j)]_{M \times M} ,\) which are calculated by
For a given pair (i, j) of generators, four indexes after normalization will have different values, so it would be difficult to identify the different coherent groups of generators because all four indexes for one pair of generators might not be better than that for the other pairs. As a result, a synthesized similarity index for identifying the coherency of generators should be given to solve this issue. Therefore, the weighting method is employed to generate the following M×M synthesized similarity matrix.
where W 1, W 2, W 3, W 4 are the weights of the angle deviation similarity \(I_{\text{L}}^{\prime } (i,j)\), swing direction similarity \(I_{\text{D}}^{\prime } (i,j)\), rotating speed deviation similarity \(I_{\text{S}}^{\prime } (i,j)\) and corner deviation similarity \(I_{\text{C}}^{\prime } (i,j)\), respectively. Equation (10) is used to find the coherent and equivalent generators based on the aggregation method [22, 23] which is also employed in DYNRED (Dynamic reduction program of EPRI, USA) [20, 25–27]. Theoretical details could be found in [22, 23]. If the trajectories of two generators i and j are similar, which means that these two generators are within one coherent group, the value of the synthesized similarity index I Coherency(i, j) would be relatively small; otherwise, it would be relatively large. Therefore, the coherency of generators could be identified by the elements of the synthesized similarity index matrix I Coherency. The synthesized similarity matrix I Coherency is also symmetrical, i.e., I Coherency(i, j) = I Coherency(j, i), which means that the coherency between the i th and j th generators is identical to the one between the j th and i th generators. Thus, there is M(M − 1)/2 pairs of generators for identifying their coherency.
2.2 Coherency evaluation based on entropy weight
It can be seen from (10) that the synthesized similarity index matrix I Coherency is impacted by four similarity matrices \(\varvec{I}_{\text{L}}^{\prime }\), \(\varvec{I}_{\text{D}}^{\prime }\), \(\varvec{I}_{\text{S}}^{\prime }\) and \(\varvec{I}_{\text{C}}^{\prime }\), which are calculated by the PMU sampling values of generator trajectories, and four index weights W 1, W 2, W 3 and W 4, which is to be determined. If different weights are selected, different coherency identification results will be obtained. So how to select the appropriate weights for four indexes will impact on the accuracy of coherency identification.
In practice, the relative importance (i.e. weight) of each evaluating index (or attribute) was also considered in multi-attribute decision-making. A direct and simple method for determining weights is to set each index with a value by power experts based on their knowledge and experience. However, the experts who is unfamiliar the power systems will give the incorrect weights for four similarity indexes, and then will impact the correctness of coherency identification of generators.
In thermodynamics, entropy can be employed to measure the disorder. According to information theory, the disorder of the obtained information (i.e. the sampling points of generator trajectories in this paper) can also be measured by entropy [24]. The values of the sampling points of generator trajectories are disorder, so it can be deduced from some closely related indexes based on the entropy. Thus, an objective weight, which is denoted as the entropy weight, can be deduced from the entropy of the parameters of the sampling points of generator trajectories in this paper.
In order to determine the weights of four indexes by using the entropy theory, the problem of coherency identification of generators in (10) can be transferred into a decision-making problem with four evaluating indexes and the Q schemes to be evaluated, where Q is equal to M(M − 1)/2 and each pair of two generators is regarded as a scheme. The evaluating matrix of this decision-making problem can be represented as
where r uq is the q th element above the diagonal elements of the u th index matrix. U is the number of the similarity indexes. In this paper, U is equal to 4.
Thus, the entropy H u of the u th similarity index is defined as
where \(f_{uq} = r_{uq} /\sum\nolimits_{q = 1}^{Q} {r_{uq} }\); \(k = 1/\ln Q\). \(f_{uq} \ln f_{uq}\) would be set to zero if f uq is equal to zero. So, the entropy weight W u of the u th similarity index is defined as
It can be concluded from the definitions of entropy and entropy weight that there is \(0 \le W_{u} \le 1\) (\(i = 1,2, \cdots ,U\)) and \(\sum\nolimits_{u = 1}^{U} {W_{u} } = 1\). The entropy may be relatively small if the values of the u th similarity index of all the pairs of generators are greatly different from one another, but its entropy weight may be relatively large. It means that some available information is provided by this index. So, the index should be given particular considerations if its values are significantly different. It should be pointed out that the entropy weight is not the coefficient reflecting the actual importance of the index, but the coefficient reflecting the relative important degree of the index in the competition with all the given indices of all the pairs of the generators.
With the obtained entropy weights of the similarity indexes, the synthesized similarity values of each pair of the generators can be determined by (10). Then, the coherency and its ranking of all the pair of the generators can be obtained.
2.3 Coherency identification based on hierarchical clustering algorithm
Hierarchical clustering is a clustering analysis method which seeks to build a hierarchy of clusters. In general, hierarchical clustering methods consist of the agglomerative one, which is a “bottom up” approach, and divisive one, which is a “top down” approach, and the dendrogram is employed to demonstrate the clustering results [22].
For power systems, each generator can be considered as a cluster, and the generators with highest coherency can be clustered into one group first. Furthermore, Equation (10) is used to find the coherent and equivalent generators based on the aggregation method. Thus, the agglomerative method is employed to identify the coherent groups of generators in this paper. The steps of hierarchical clustering method for coherency identification are presented as follows.
-
Step 1: Set the number C G of the coherent groups of generators as 0.
-
Step 2: Set each generator as a cluster. There are M clusters for the power system with M generators.
-
Step 3: Acquire the generator angles and rotating speeds data from WAMS, and then obtain M trajectories of the generator angles and rotating speeds respectively.
-
Step 4: Calculate the values of four similarity indexes in (1)–(3) and (5) based on the obtained trajectories of the generator angles and rotor speeds, and form the four similarity matrices I L, I D, I S and I C.
-
Step 5: Normalize I L, I D, I S and I C to \(\varvec{I}_{\text{L}}^{\prime }\), \(\varvec{I}_{\text{D}}^{\prime }\), \(\varvec{I}_{\text{S}}^{\prime }\) and \(\varvec{I}_{\text{C}}^{\prime }\) for comparison using (6)–(9), respectively.
-
Step 6: Transfer four similarity matrices \(\varvec{I}_{\text{L}}^{\prime }\), \(\varvec{I}_{\text{D}}^{\prime }\), \(\varvec{I}_{\text{S}}^{\prime }\) and \(\varvec{I}_{\text{C}}^{\prime }\) into a decision-making problem with four evaluating indexes and the Q schemes to be evaluated.
-
Step 7: Calculate the entropy and entropy weights of four evaluating indexes by (12) and (13), respectively, and W 1, W 2, W 3 and W 4 in (10) can be obtained.
-
Step 8: Calculate the synthesized similarity matrix in (10), and obtained the synthesized similarity value of each pair of any two generators.
-
Step 9: Rank all the pairs of generators based on their synthesized similarity values.
-
Step 10: Seek and select a pair of the generators with minimum value of synthesized similarity index. If there exist any coherent groups, check whether any of two generators of the selected pair with minimum similarity index value are in any coherent group. If two generators in the pair are all in one coherent group, discard the selected pair of generators. If only one generator in the pair is in one coherent group, merge the generator not in coherent group into the coherent group where the other generator located. If both generators in the pair are not included in the same coherent group, then set a new coherent group to include these two generators in the pair, and hence the number C G of coherent groups increases by one.
-
Step 11: Remove the value of the selected pair of the generators from the ranking lists. Repeat Step 9 until there are no generators in a cluster alone.
-
Step 12: Obtain the C G groups of coherent generators clustered and the clustering dendrogram.
3 Optimization model of islanding schemes based on coherent generators
After the coherent groups of generators are determined from the trajectories monitored by WAMS, the next step is to search for an optimum cut set to split the power systems into several subsystems. There are many possible methods to do that such as minimal cutset, minimal cutest with minimum net flow, K-means technique, K-way partitioning, multi-way balanced graph partitioning and angle modulated particle swarm optimization. In this paper, the minimal cutset method is presented with the obtained coherent generator groups considered, in which minimal power flow disruption is selected as the optimization objective. Thus, for an M-generator B-bus power system with L branches, the optimization objective for optimizing the controlled islanding schemes can be represented by
where \(F_{l}^{\text{P} }\) is the actual active power of transmission line l before islanding; a l is the operating state of transmission line l. If the transmission line l is disconnected in the islanding schemes, a l = 0; otherwise, a l = 1. The optimization objective of (14) is to construct islands with minimum change from the pre-disturbance power flow pattern, which is for improving transient stability of the split islands and reducing the overloading possibility of transmission lines within each island [3]. Furthermore, it would maintain a good power balance to some certain extent, which is for reducing the amount of load shedding and maintaining the frequency in each island within the permitted ranges.
The optimization model is based on the coherency identification, so the coherency constraint should be satisfied for the islanding schemes. The coherency constraint is that all the coherent generators in one group should be split into one island, and any two non-coherent generators cannot be split into one island. It is assumed that there are C CG coherent groups of generators in the power system; and the power system is split into C CG islands. The coherency constraint can be represented by
where e, f \(\in\){1,2, …, C CG}; \(\varOmega_{{{\text{CG}},e}}^{{}}\) is the set of the generators in the e th coherent group; \(\varOmega_{{{\text{Island}},f}}^{{}}\) is the set of the nodes in the f th island.
After the power system has been split, the following constraints should also be respected.
-
1)
Power flow constraints
For any bus x \(\in\){1,2, …,B}, there exist
where \(\varOmega_{x}^{{}}\) is the set of nodes which are connected with node x in the power system after islanding; \(F_{{{\text{G}}x}}^{\text{P}}\) and \(F_{{{\text{G}}x}}^{\text{Q}}\) are the real and reactive power generation in node x after islanding; \(F_{{{\text{L}}x}}^{\text{P}}\) and \(F_{{{\text{L}}x}}^{\text{Q}}\) are the real and reactive power of the loads in node x; \(V_{x}^{{}}\) and \(V_{y}^{{}}\) are the voltage amplitude of nodes x and y after islanding; \(G_{xy}\) and \(B_{xy}\) are the real and imaginary elements in the x th row and y th column of bus admittance matrix; \(\delta_{xy}^{{}}\) is the voltage phase difference between bus x and bus y after islanding.
-
2)
Generation output constrains
where \(F_{{{\text{G}}m}}^{\text{P}}\) and \(F_{{{\text{G}}m}}^{\text{Q}}\) are the active and reactive power outputs of generator m after islanding; \(F_{{{\text{G}}m}}^{\text{P,min}}\), \(F_{{{\text{G}}m}}^{\text{P,min}}\), \(F_{{{\text{G}}m}}^{\text{Q,max}}\) and \(F_{{{\text{G}}m}}^{\text{Q,min}}\) are the maximum active power, minimum active power, maximum reactive power and minimum reactive power of generator m, respectively.
-
3)
Constrains of bus voltage magnitudes
where \(V_{x}^{{}}\) is the voltage amplitude of node m after islanding; \(V_{x}^{\hbox{min} }\) and \(V_{x}^{\hbox{max} }\) are the minimum and maximum amplitude of the voltage of node x.
-
4)
Constrains of transmission line capacities
where L s is the set of transmission lines which are disconnected in the islanding strategy; \(F_{l}^{\text{P,max}}\) is the active power transmission capacity of transmission line l.
-
5)
Connectivity constraints
where \(L_{x \leftrightarrow y}\) is the set of the transmission lines of the electrical paths connecting node x with node y.
Thus, the optimization model of controlled islanding schemes based on WAMS is formulated as follows.
Then, the proposed optimization model of controlled islanding schemes can be solved by the minimal cutset method.
4 Case studies
A 16-generator 68-bus sample power system is employed to demonstrate the proposed WAMS-based islanding scheme and the traditional slow coherency based islanding schemes in which the coherent groups of generators are determined by modal analysis [25–27]. Furthermore, the reduced WECC 29-unit 179-bus power system [28] is also employed to demonstrate the proposed WAMS-based islanding scheme, and the traditional slow coherency based islanding schemes is taken from [20].
4.1 16-generator 68-bus sample power system
In the 16-generator 68-bus power system, the 4th-order generator model was used for all the generators. The detailed data associated with this power system can be found in [25, 29].
For traditional slow coherency based islanding schemes, 16 generators are divided into five coherent groups which are as follows: CG1 = {G1, G2,…, G9}, CG2 = {G10, G11, G12, G13}, CG3 = {G14}, CG4 = {G15} and CG5 = {G16}. The optimized islanding strategy is obtained and shown in Fig. 1. The optimal cutsets among five coherent groups of generators are {L 1–2, L 1–27, L 8–9, L 1–47, L 38–46, L 35–45, L 43–44, L 41–42, L 42–52} Thus, the optimal islanding strategy obtained by the traditional method is to split the power system into 5 islands, and the power flow disruption of the optimized islanding strategy is equal to 6.925 p.u.

Islanding strategy based on slow coherency in traditional method
For the proposed WAMS-based islanding schemes, it is assumed that each generator bus is equipped with one PMU, so the generator angles and rotating speeds of 16 generators can be sampled and acquired by WAMS with coordinated universal time. The following two cases are presented for demonstration.
-
Case 1: A fault at bus 16 for 0.16 s
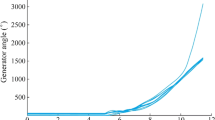
A fault at bus 16 is applied to the power system and is cleared after 0.16 s for simulating the measured data of generator angles and rotating speeds of 16 generators by PMUs. The curves of the generators’ angles are shown in Fig. 2. It would be difficult to determine the coherent groups of generators based on the swing trend of the curves. Thus, the proposed coherency identification method based on the hierarchical clustering algorithm is applied to identify the coherent groups for the swing curves measured by WAMS. First, the four similarity matrices I L, L D, L S and L C are calculated and normalized, and then the entropy weights of four evaluating indexes, i.e., W 1, W 2, W 3 and W 4, are obtained and equal to 0.3810, 0.1288, 0.3187 and 0.1715, respectively. It can be seen that the weights of the angle deviation similarity and rotating speed deviation similarity are greater than these of swing direction similarity and corner deviation similarity. The synthesized similarity matrix is obtained, and the clustering dendrogram is plotted and shown in Fig. 3. It can be seen from Fig. 3 that the generators are clustered as three coherent groups which are denoted as CG1′, CG2′ and CG3′. CG1′ = {G1, G2,…, G9}, CG2′ = {G10, G11, G12, G13}, and CG3′ = {G14, G15, G16}. The generators in the same coherent group are connected each other, and there is no connection among the generators in different coherent groups.

Swing curves of generators’ angles in Case 1

Clustering dendrogram for Case 1
To demonstrate whether the proposed WAMS-based method is suitable for actual measurements in a noise condition, a white Gaussian noise is added to the measured data of generator angles and rotating speeds for simulating the measuring noise. The curves of the angles of generators with the white Gaussian noise are shown in Fig. 4. Then, the median filter algorithm is employed to pre-filter the white Gaussian noise from the measured data. Figure 5 shows that swing curves of the angles of generators after filtering. It can be seen from Fig. 5 that the white Gaussian noise in the measured data is reduced to some extent. Finally, the proposed WAMS-based method is applied to identify the coherent groups based on the swing curves in which the white Gaussian noise is pre-filtered in Fig. 5. The clustering dendrogram is attained and shown in Fig. 6. It can be seen from Figs. 3 and 6 that the division result of the coherent groups for Case 1 with white Gaussian noise considered is the same with that without considering the white Gaussian noise, and this means that the division result of the coherent groups is not affected by the noise in the measured data for Case 1.

Swing curves of generators’ angles with white Gaussian noise in Case 1

Swing curves of generators’ angles after filtering in Case 1

Clustering dendrogram for Case 1 considering white Gaussian noise
Finally, the islanding strategies is optimized based on the obtained three coherent groups of generators and the proposed model. The optimal cutset is obtained as {L 1–2, L 1–27, L 1–47, L 8–9, L 35–45, L 38–46, L 43–44}, and the power flow disruption is equal to 4.827 p.u.. It can be seen that there are seven transmission lines disconnected by the islanding scheme. The optimized islanding strategy is shown in Fig. 7.

Islanding strategy based on WAMS for Case 1
-
Case 2: A fault at bus 45 for 0.60 s
A fault at bus 45 is applied to the power system and is cleared after 0.60 s for simulating the measured data of generator angles and rotating speeds of 16 generators by PMUs. The curves of the generators’ angles are shown in Fig. 8. It would be difficult to determine the coherent groups of generators based on the swing trend of the curves. Thus, the proposed the coherency identification method based on hierarchical clustering algorithm is applied to identify the coherent groups for the swing curves measured by WAMS. The entropy weights of four evaluating indexes, i.e., W 1, W 2, W 3 and W 4, are obtained and equal to 0.3459, 0.1713, 0.2821 and 0.2007, respectively. The clustering dendrogram is plotted and shown in Fig. 9. It can be seen from Fig. 9 that the generators are clustered as two coherent groups which are denoted as CG1″ and CG2″. CG1″ = {G1, G2, …, G13}, and CG2″ = {G14, G15, G16}. The generators in the same coherent group are connected each other, which means that these generators are strongly coherent. For example, the generators G1, G2, …, G13 in the coherent group CG1″ are connected with numerous coherent lines, thus it can be concluded that the generators G1, G2, …, G13 are strongly coherent each other.

Swing curves of generators’ angles in Case 2

Clustering dendrogram for Case 2
For checking whether the proposed WAMS-based method is suitable for real measurement in a noise condition, a white Gaussian noise is added to the measured data of generator angles and rotating speeds for simulating the measuring noise. The curves of the generators’ angles with white Gaussian noise are shown in Fig. 10. Then, the median filter algorithm is employed to pre-filter the white Gaussian noise from the measured data. Figure 11 shows that swing curves of the generators’ angles after filtering. It can be seen from Fig. 11 that the white Gaussian noise in the measured data is reduced to some extent. Finally, the proposed WAMS-based method is applied to identify the coherent groups based on the swing curves in which the white Gaussian noise is pre-filtered in Fig, 11. The clustering dendrogram is obtained and shown in Fig. 12. It can be seen from Figs. 9 and 12 that the division result of the coherent groups for Case 2 with white Gaussian noise considered is same to that without considering white Gaussian noise, which also means that the division result of the coherent groups is not affected by the noise in the measured data for Case 2.

Swing curves of generators’ angles with white Gaussian noise in Case 2

Swing curves of generators’ angles after filtering in Case 2

Clustering dendrogram for Case 2 considering white Gaussian noise
Finally, the optimal cutset is obtained as {L 1–47, L 35–45, L 38–46, L 43–44}, and the power flow disruption is equal to 3.939 p.u.. It can be seen that there are four transmission lines are disconnected in the islanding strategy. The optimized islanding strategy based on WAMS for Case 2 is shown in Fig. 13.

Islanding strategy based on WAMS for Case 2
In summary, the simulation results optimized by the proposed WAMS-based islanding schemes and the traditional slow coherency based islanding schemes are shown in Table 1.
It can be seen from Table 1 that the proposed WAMS-based islanding schemes divide the 16 generators into three and two coherent groups, and then split the 68-bus power system into three islands and two islands for Case 1 and Case 2, respectively. However, the traditional slow coherency islanding schemes divide the 16 generators into five coherent groups, and then split the power system into five islands. Compared to the traditional slow coherency islanding schemes, the proposed WAMS-based islanding schemes could split the power system into fewer islands and disconnect fewer transmission lines. Thus, the power flow disruptions of the proposed WAMS-based islanding strategies are reduced by 30.30% and 43.12% for Case 1 and Case 2, respectively, which means that the disturbance on the power systems could be alleviated. Furthermore, it can also be seen from Table 1 that the coherent groups identified by the proposed WAMS-based islanding schemes are similar to the coherent groups obtained by the traditional slow coherency islanding schemes. In Case 1, the first two coherent groups identified by traditional slow coherency method are maintained, but the last three coherent groups {G14}, {G15} and {G16} are merged into one new coherent group {G14, G15, G16}. In Case 2, the first two coherent groups identified by traditional method are merged into one new coherent group {G1, G2, …, G13}, and the last three coherent groups {G14}, {G15} and {G16} are merged into one new coherent group {G14, G15, G16}. It can be concluded that the proposed WAMS-based islanding schemes could merge part of strongly coherent groups of generators into a new coherent group according to different operation characteristic of power systems. As a result, the proposed WAMS-based islanding algorithm could reduce the number of coherent generation groups and disconnected transmission lines, and then a more reasonable and stable islanding strategies could be obtained.
4.2 Reduced WECC 29-unit 179-bus power system
For the reduced WECC 29-unit 179-bus power system, classical second-order differential model reflecting the motion of the rotor was used for all the generators, and constant MVA model for all loads. The detailed data associated with this power system can be found in [28, 30].
For traditional islanding schemes based on slow coherency, 29 generators are divided into four coherent groups which are as follows: CG1 = {G30, G35, G65, G70, G77, G79}, CG2 = {G103, G112, G116, G118}, CG3 = {G13, G15, G40, G43, G47, G138, G140, G144, G148, G149}, and CG4 = {G4, G6, G9, G11, G18, G36, G45, G159, G162} [20]; the optimal cutsets among four coherent groups of generators are {L 76–82, L 86–180, L 153–175, L 153–177, L 153–179, L 14–29}. Thus, the optimal islanding strategy obtained by the traditional method is to split the power system into 4 islands, and the power flow disruption of the optimized islanding strategy is equal to 41.441 p.u.
For the proposed WAMS-based islanding schemes, it is assumed that each generator bus is equipped with one PMU, so the generator angles and rotating speeds of 29 generators can be sampled and acquired by WAMS with coordinated universal time.
A fault at bus 79 is applied to the power system and is cleared after 0.05 s for simulating the measured data of generator angles and rotating speeds of 29 generators by PMUs. For simulating the measuring noise, a white Gaussian noise is added to the measured data of generator angles and rotating speeds. The curves of the generators’ angles with white Gaussian noise are shown in Fig. 14. It would be difficult to determine the coherent groups of generators based on the swing trend of the curves. Thus, the proposed coherency identification method based on the hierarchical clustering algorithm is applied to identify the coherent groups for the swing curves measured by WAMS.

Swing curves of generators’ angles with white Gaussian noise in WECC power system
It can be obtained that the generators are clustered as three coherent groups which are denoted as CG1′, CG2′ and CG3′. CG1′ = {G13, G15, G30, G35, G40, G43, G47, G65, G70, G77, G79, G103, G112, G116, G118, G138, G140, G144, G148, G149}, CG2′ = {G4, G6, G9, G11, G18}, and CG3′ = {G36, G45, G159, G162}. The optimal cutsets among three coherent groups of generators are {L 86–180, L 8–163, L 5–160, L 14–29}. Thus, the optimal islanding strategy obtained by the WAMS-based method is to split the power system into 3 islands, and the power flow disruption of the optimized islanding strategy is equal to 22.132 p.u.
In summary, the simulation results optimized by the proposed WAMS-based islanding schemes and the traditional slow coherency based islanding schemes are shown in Fig. 15 and Table 2.

Islanding strategies based on slow coherency and WAMS for WECC power system
It can be seen from Table 2 that the proposed WAMS-based islanding scheme could split the power system into less islands and disconnect less transmission lines, comparing to the traditional slow coherency islanding scheme. The power flow disruption of the proposed WAMS-based islanding strategy is reduced by 46.59% in this case, and this means that the disturbance on the given power system could be alleviated.
5 Conclusion
A coherency identification algorithm is first presented to determine the coherent generation groups based on the hierarchical clustering and WAMS. The clustering dendrograms are obtained for identifying the coherent groups of generators. Then, the optimization model of controlled islanding schemes for interconnected power systems is proposed with coherent generation groups considered. Finally, the case studies are performed on the 16-generator 68-bus test power system and the reduced WECC 29-unit 179-bus power system for checking the effectiveness of the proposed WAMS-based islanding schemes. The results show that the proposed WAMS-based islanding scheme could divide the power system into less islands according to different operating characteristic of different cases when comparing to the traditional slow coherency based islanding scheme, and power flow disruptions could be reduced by the proposed WAMS-based islanding scheme which would decrease the disturbance level on the split islands and then would be helpful for maintaining the stability of split islands.
References
Xue YS (2015) Energy internet or comprehensive energy network? J Mod Power Syst Clean Energy 3(3):297–301. doi:10.1007/s40565-015-0111-5
Fang YJ (2014) Reflections on stability technology for reducing risk of system collapse due to cascading outages. J Mod Power Syst Clean Energy 2(3):264–271. doi:10.1007/s40565-014-0067-x
Lin ZZ, Norris S, Shao HB, et al (2014) Transient stability assessment of controlled islanding based on power flow tracing. In: Proceedings of the 18th power systems computation conference (PSCC’14), Wroclaw, 18–22 Aug 2014, 7 pp
Shao HB, Norris S, Lin ZZ (2013) Determination of when to island by analysing dynamic characteristics in cascading outages. In: Proceedings of the 2013 IEEE Grenoble PowerTech conference (POWERTECH’13), Grenoble, 16–20 June 2013, 6 pp
Tang F, Yang J, Liao QF et al (2015) Out-of-step oscillation splitting criterion based on bus voltage frequency. J Mod Power Syst Clean Energy 3(3):341–352. doi:10.1007/s40565-015-0140-0
Wang MS, Mu YF, Jia HJ et al (2015) A preventive control strategy for static voltage stability based on an efficient power plant model of electric vehicles. J Mod Power Syst Clean Energy 3(1):103–113. doi:10.1007/s40565-014-0092-9
Liu YQ, Liu YT (2008) An islanding cutset searching approach based on dispatching area. Automat Electr Power Syst 32(11):20–24
Lin JK, Wang XD, Wang P et al (2012) A two-stage method for optimal island partition of the distribution system with distributed generation. IET Gener Transm Distrib 6(3):218–225
Zhao QC, Sun K, Zheng DZ et al (2003) A study of system splitting strategies for island operation of power system: a two-phase method based on OBDDs. IEEE Trans Power Syst 18(4):1556–1565
Norris S, Guo S, Bialek J (2012) Tracing of power flows applied to islanding. In: Proceedings of the 2012 IEEE Power and Energy Society general meeting, San Diego, 22–26 July 2012, 8 pp
Ding L, Gonzalez-Longatt FM, Wall P et al (2013) Two-step spectral clustering controlled islanding algorithm. IEEE Trans Power Syst 28(1):75–84
Song HL, Wu JY, Wu K (2014) A wide-area measurement systems-based adaptive strategy for controlled islanding in bulk power systems. Energies 7(4):2631–2657
Jin M, Sidhu TS, Sun K (2007) A new system splitting scheme based on the unified stability control framework. IEEE Trans Power Syst 22(1):433–441
Franco R, Sena C, Taranto GN et al (2013) Using synchrophasors for controlled islanding—A prospective application for the Uruguayan power system. IEEE Trans Power Syst 28(2):2016–2024
Vahidnia A, Ledwich G, Palmer E et al (2012) Generator coherency and area detection in large power systems. IET Gener Transm Distrib 6(9):874–883
Anaparth KK, Chaudhuri B, Thornhill NF et al (2005) Coherency identification in power systems through principal component analysis. IEEE Trans Power Syst 20(3):1658–1660
Ariff MAM, Pal BC (2013) Coherency identification in interconnected power system—an independent component analysis approach. IEEE Trans Power Syst 28(2):1747–1755
Jonsson M, Begovic M, Daalder J (2004) A new method suitable for real-time generator coherency determination. IEEE Trans Power Syst 19(3):1473–1482
Wu XY, Wei ZN, Sun GQ et al (2013) A method for identifying coherent generators based on non-negative matrix factorization. Automat Electr Power Syst 37(14):59–64. doi:10.7500/AEPS201208013
Sun K, Hur K, Zhang P (2011) A new unified scheme for controlled power system separation using synchronized phasor measurements. IEEE Trans Power Syst 26(3):1544–1554
Lin ZZ, Xia T, Ye YZ et al (2013) Application of wide area measurement systems to islanding detection of bulk power system. IEEE Trans Power Syst 28(2):2006–2015
Zhang YZ, Zhang YX, Meng GP et al (2015) A wide area information based clustering recognition method of coherent generators. Power Syst Technol 39(10):2889–2893
Lee JG, Han JW, Whang KY (2007) Trajectory clustering: a partition-and-group framework. In: Proceedings of the 2007 ACM SIGMOD international conference on management of data (SIGMOD’07), Beijing, 11–14 June 2007, 12 pp
Lin ZZ, Wen FS, Huang JS et al (2010) Evaluation of black-start schemes employing entropy weight-based decision-making theory. J Energy Eng-ASCE 136(2):42–49
Rogers G (2000) Power system oscillations. Kluwer Academic Publishers, Boston
Chow JH (1996) A nonlinear model reduction formulation for power system slow coherency and aggregation. In: Proceedings of the workshop on advances in control and its applications, Lecture Notes in Control and Information Sciences, vol 208, pp 282–298
Joo SK, Liu CC, Jones LE et al (2004) Coherency and aggregation techniques incorporating rotor and voltage dynamics. IEEE Trans Power Syst 19(2):1068–1075
Sun K (2016) Test cases library of power system sustained oscillations. Department of Electrical Engineering and Computer Science, The University of Tennessee (Knoxville), Knoxville
Jiang T, Jia HJ, Yuan HY et al (2016) Projection pursuit: a general methodology of wide-area coherency detection in bulk power grid. IEEE Trans Power Syst 31(4):2776–2786
Maslennikov S, Wang B, Zhang Q, et al (2016) A test cases library for methods locating the sources of sustained oscillations. In: Proceedings of the 2016 IEEE Power and Energy Society general meeting, Boston, 17–21 July 2016, 5 pp
Acknowledgment
This work is jointly supported by the National Key Research Program of China (No. 2016YFB0900105), National Natural Science Foundation of China (No. 51377005) and Specialized Research Fund for the Doctoral Program of Higher Education (No. 20120101110112).
Author information
Authors and Affiliations
Corresponding author
Additional information
CrossCheck date: 12 June 2016
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
LIN, Z., WEN, F., ZHAO, J. et al. Controlled islanding schemes for interconnected power systems based on coherent generator group identification and wide-area measurements. J. Mod. Power Syst. Clean Energy 4, 440–453 (2016). https://doi.org/10.1007/s40565-016-0215-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40565-016-0215-6