
Abstract
Current quality is one of the most important issues for operating three-phase grid-connected inverter in distributed generation systems. In practice, the grid current quality is degraded in case of non-ideal utility voltage. A new control strategy is proposed for the three-phase grid-connected inverter. Different from the traditional method, our proposal utilizes the unique abc-frame complex-coefficient filter and controller to achieve the balanced, sinusoidal grid current. The main feature of the proposed method is simple and easy to implement without any frame transformation. The theoretical analysis and experimental test are presented. The experimental results verify the effectiveness of the proposed control strategy.
Similar content being viewed by others

Explore related subjects
Discover the latest articles and news from researchers in related subjects, suggested using machine learning.Avoid common mistakes on your manuscript.
1 Introduction
With expected long term rising fossil fuel prices and declining prices of photovoltaic (PV) cells and modules, PV power systems continue to grow around the world and become one of the least cost options of renewable electricity [1]. With high penetration of PV systems into the grid, the impact of PV systems on the grid becomes more and more significant [2]. One of the most important issues is the power quality from grid-connected inverters [3–5]. The grid-connected inverter may inject harmonics and thus pollute the grid. IEEE Std. 929-2000 specified that the total harmonic distortion of the injected grid current must be less than 5% [6]. Therefore, it is important to regulate the grid-connected inverter to achieve the sinusoidal current injection.
Many interesting control proposals have been reported in the past decades. A method to improve the inverter output current by using the capacitor current feedforward disturbance rejection was proposed in [7]. Reference [8] presented a method via the grid feed forward and the multi-harmonic resonant control for the current quality improvement. Another interesting method in [9] achieved the harmonic cancellation for grid-connected inverters by randomizing a tuning parameter of the current controller. Note that the abovementioned methods are mainly for single-phase grid-connected inverters. For three-phase grid-connected inverters, further requirements should be considered. The grid current should follow the fundamental positive sequence component of the grid voltage with a preset current value. That’s why so many phase-locked loops have been proposed in recent years [10–17]. In [10], a method for extracting the fundamental frequency positive-sequence voltage was proposed based on the simple mathematical transformations. Another interesting method in [11] utilized the decoupled double synchronous reference frame phase-locked loop. An improvement in [12] used an adaptive synchronous reference frame phase-locked loop. A multiple reference frame based phase-locked loop was reported in [13] to extract the fundamental positive sequence component of the grid voltage. Also, multiple reference frame based PI control was used to maintain a balanced set of three-phase sinusoidal currents. However, the method required many reference frame transformations and increased the computational burden. Therefore, the phase-locked loop and control strategy without any frame transformations needs further investigation.
The objective of this paper is to present a new abc frame complex-coefficient filter and controller to improve the current quality of the three-phase grid-connected inverter. This paper is organized as follows. Section 2 presents the control strategy including the detailed implementation of the abc frame complex-coefficient filter and controller. The experimental verification of the proposed method is presented in Section 3. Finally, the conclusion is provided in Section 4.
2 Proposed control strategy
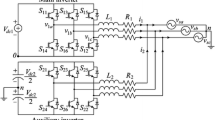
The schematic diagram of a three-phase grid-connected inverter is illustrated in Fig. 1, where an LCL filter is used to attenuate the high-frequency harmonics due to switching [18, 19]. The control objective is to inject sinusoidal currents into the grid, which complies with the relevant IEEE Standard [6].

Schematic diagram of three-phase grid-connected inverter
In practice, the grid voltage is polluted with harmonics, which can be mathematically expressed as (1), where \(U_{M}^{ + }\) and \(\omega_{0}\) are the amplitude and angular frequency of fundamental positive sequence component of three-phase grid voltage respectively; n is the harmonic order; \(U_{N}\) and \(\varphi_{N}\) are the amplitude and phase of harmonic component of grid voltage respectively.
In this case, the grid current should follow the fundamental positive sequence component of three-phase grid voltage. The current reference is defined as follows:
From (2), it can be observed that the fundamental positive sequence component of grid voltage should be estimated for the current reference generation, which could be achieved by a new method proposed in Fig. 2. The basic idea of the proposed method is to eliminate the fundamental negative sequence component and attenuate the harmonic components of the grid voltage with the complex-coefficient filters. Different from the method in [20], the proposed method is simple and based on abc frame with no need of any frame transformation. In this way, the fast and accurate estimation of the fundamental positive sequence component can be achieved.

Proposed estimation method
The following mathematical equations can be obtained from Fig. 2, where i = a, b, or c. \(\omega_{C}\) is the cutoff frequency, and \(\omega_{C} = 0.707\omega_{0}\) in this paper.
With (3) and (4), the transfer function of the estimated fundamental positive sequence component can be expressed as:
where the magnitude of F(s) is:
From (5) and (6), it can be concluded that the fundamental negative sequence component is eliminated and harmonic components are attenuated. While the fundamental positive sequence component of three-phase grid voltage remains unchanged without any attenuation or phase shift.
Fig. 3a shows the implementation of the proposed method. It should be noted that the complex coefficient j can be smartly implemented in abc frame. And the corresponding method is shown in Fig. 3b.

Detailed implementation of the proposed method
In summary, the fundamental-frequency positive sequence component of three-phase grid voltage can be obtained with the proposed method in Fig. 3b. And then the current reference can be easily obtained from (2).
In order to ensure that the grid current tracks the current reference, a closed-loop control strategy is generally used. The single-line diagram of the control structure for three-phase grid-connected inverter is shown in Fig. 4, where C(s) is the current controller, K is the pulse width modulation (PWM) gain, R 2 is the resistor used for the passive damping [19], and U g is the grid voltage.

Single-line diagram of the control structure
The grid current can be derived from Fig. 4 as:
where \(N(s) = \frac{{(L_{2} s + R_{2} )}}{{L_{1} L_{2} R_{2} Cs^{3} + L_{1} L_{2} s^{2} + R_{2} (L_{1} + L_{2} )s}}\); \(H(s) = L_{1} Cs^{2} + 1\).
The control objective is that the grid current tracks the current reference, which means R(s) = 1 and \(Y(s) = \infty\). From the viewpoint of superposition theorem, \(I_{2} (s) = I_{2}^{*} (s)\).
To achieve the abovementioned control objective, a new abc-frame complex coefficient controller is proposed as shown in (8) and Fig. 5, where \(\omega_{x}\)is the angular frequency, and can be adjusted according to the specified requirements.

Implementation of the proposed complex-coefficient controller
Substituting (8) into (7), it can be concluded that R(s) = 1 and \(Y(s) = \infty\) when \(\omega_{x}\) matches the frequency of the current reference or grid voltage. In this way, both the perfect tracking of the current reference and disturbance rejection of grid voltage harmonic can be achieved. It should be noted that the harmonic amplitude of the grid voltage tends to be lower as the harmonic order increases. Therefore, only the low-order harmonics are considered, e.g., \(\omega_{x} = \omega_{0} , - \omega_{0} , - \omega_{5} ,\omega_{7}\).
To further simplify the controller, assume D(s) = 1 and N(s) = k x . Also a proportional term can be integrated into the controller. The above-mentioned complex-coefficient filters and controller are implemented with the third order integrator in a discrete-time form [20].
where \(u\) and \(y\) are the input and output of integrator respectively; and \(T_{s}\) is the sample period.
The digital forms of the filters and controllers are presented as:
Fig. 6 shows the proposed control structure of three- phase grid-connected inverter. Firstly, the grid voltages are sampled via Hall sensors. With the method in Fig. 3b, the fundamental positive sequence component of grid voltage can be obtained. And the current reference is available with (2). (Secondly, the grid current is sampled, then minus the current reference.) The current error passes the controller in (8) to get the modulation signal. Finally, the symmetrical PWM (SYPWM) [21] is used to generate the switching signals. In this way, the three-phase balanced and sinusoidal current can be achieved, which complies with IEEE Std. 929-2000.

Systematic control structure of the grid-connected inverter
3 Experimental results
The proposed control strategy is experimentally evaluated using a three-phase grid-connected inverter. The abc-frame complex-coefficient filter and controller are digitally implemented using a 32-bit fixed-point 150 MHz TMS320F2812 DSP. The experimental parameters are as follows:the dc bus voltage is 250 V; the switching frequency is 10 kHz; L 1 = 3 mH; L 2 = 1.5 mH; and C = 9.4 uF. A resistor of 10 \(\varOmega\) is paralleled with L 2 for damping. The experimental waveform of grid voltage is shown in Fig. 7. The THDh and unbalance ratio of the grid voltage is about 5% and 30%, respectively.

Experimental waveform of grid voltage
Fig. 8 shows experimental results in \(\omega_{x} = \omega_{0} ,\, - \omega_{0}\). The modulation signal is unbalanced to cancel the impact of unbalanced grid voltage for achieving balanced three-phase currents, as show in Fig. 8b. However, the grid current is distorted due to grid voltage harmonics. From FFT analysis in Fig. 8c, it can be observed that the dominant harmonics are 5th and 7th components.

Experimental results with \(\omega_{x} = \omega_{0} ,\; - \omega_{0}\)
Fig. 9 shows the experimental results in case of \(\omega_{x} = \omega_{0} , - \omega_{0} , - \omega_{5} ,\omega_{7}\). In contrast with the experimental results in Fig. 8, the 5th and 7th current harmonics are eliminated. Therefore, as shown in Fig. 9b, both balanced and sinusoidal three-phase currents are achieved, which verifies the effectiveness of the proposed strategy.

Experimental results with \(\omega_{x} = \omega_{0} ,\; - \omega_{0} ,\, - \omega_{5} ,\,\omega_{7}\)
4 Conclusion
This paper has presented a new control strategy for three-phase grid-connected inverter. The theoretical analysis and experimental results reveal that the current harmonics can be reduced and current quality is improved with the proposed solution. Also, the proposed strategy is simple and easy to implement without any frame transformation. Therefore, it is attractive for the current quality improvement of three-phase grid connected inverter in distributed generation systems.
References
Nowak S (2014) Photovoltaic power systems programme. Annual Report, International Energy Agency, Paris
The IEA PVPS Task 14 (2010) High penetration PV in electricity grids. Annual Report, International Energy Agency, Paris
Infield DG, Onions P, Simmons AD et al (2004) Power quality from multiple grid-connected single-phase inverters. IEEE Trans Power Deliv 19(4):1983–1989
Aiello M, Catalioti A, Favuzza S et al (2006) Theoretical and experimental comparison of total harmonic distortion factors for the evaluation of harmonic and interharmonic pollution of grid-connected photovoltaic systems. IEEE Trans Power Deliv 21(3):1390–1397
Patsalides M, Stavrou A, Efthymiou V et al (2012) Towards the establishment of maximum PV generation limits due to power quality constraints. Int J Electr Power Energy Syst 42(1):285–298
IEEE Std 929 (2000) IEEE recommended practice for utility interface of photovoltaic (PV) systems
Abeyasekera T, Johnson CM, Atkinson DJ et al (2005) Suppression of line voltage related distortion in current controlled grid connected inverters. IEEE Trans Power Electron 20(6):1393–1401
Xu JM, Tang T, Xie SJ (2014) Research on low-order current harmonics rejections for grid-connected LCL-filtered inverters. IET Power Electron 7(5):1227–1234
Armstrong M, Atkinson DJ, Johnson CM et al (2005) Low order harmonic cancellation in a grid connected multiple inverter system via current control parameter randomization. IEEE Trans Power Electron 20(4):885–892
de Souza HEP, Bradaschia F, Neves FAS et al (2009) A method for extracting the fundamental-frequency positive-sequence voltage vector based on simple mathematical transformations. IEEE Trans Ind Electron 56(5):1539–1547
Rodriguez P, Pou J, Bergas J et al (2007) Decoupled double synchronous reference frame PLL for power converters control. IEEE Trans Power Electron 22(2):584–592
Gonzalez-Espin F, Figueres E, Garcera G (2012) An adaptive synchronous-reference-frame phase-locked loop for power quality improvement in a polluted utility grid. IEEE Trans Ind Electron 59(6):2718–2731
Xiao P, Corzine KA, Venayagamoorthy GK (2008) Multiple reference frame-based control of three-phase PWM boost rectifiers under unbalanced and distorted input conditions. IEEE Trans Power Electron 23(4):2006–2017
Wang YF, Li YW (2011) Grid synchronization PLL based on cascaded delayed signal cancellation. IEEE Trans Power Electron 26(7):1987–1997
Freijedo FD, Yepes AG, López O et al (2011) Three-phase PLLs with fast postfault retracking and steady-state rejection of voltage unbalance and harmonics by means of lead compensation. IEEE Trans Power Electron 26(1):85–97
Golestan S, Monfared M, Freijedo FD et al (2014) Performance improvement of a prefiltered synchronous reference-frame PLL by using a PID-type loop filter. IEEE Trans Ind Electron 61(7):3469–3479
Golestan S, Ramezani M, Guerrero JM et al (2015) dq-frame cascaded delayed signal cancellation-based PLL: analysis, design, and comparison with moving average filter-based PLL. IEEE Trans Power Electron 30(3):1618–1632
He JW, Li YW (2012) Generalized closed-loop control schemes with embedded virtual impedances for voltage source converters with LC or LCL filters. IEEE Trans Power Electron 27(4):1850–1861
Guo XQ, Wu WY, Gu HR (2010) Modeling and simulation of direct output current control for LCL-interfaced grid-connected inverters with parallel passive damping. Simul Model Pract Theory 18(7):946–956
Guo XQ, Wu WY, Chen Z (2011) Multiple-complex coefficient-filter-based phase-locked loop and synchronization technique for three-phase grid interfaced converters in distributed utility networks. IEEE Trans Ind Electron 58(4):1194–1204
Zhou KL, Wang DW (2002) Relationship between space-vector modulation and three-phase carrier-based PWM: a comprehensive analysis. IEEE Trans Ind Electron 49(1):186–196
Acknowledgment
This work was supported by the National Natural Science Foundation of China (No. 51307149).
Author information
Authors and Affiliations
Corresponding author
Additional information
CrossCheck Date: 22 October 2015
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
GUO, X., GUERRERO, J.M. Abc-frame complex-coefficient filter and controller based current harmonic elimination strategy for three-phase grid connected inverter. J. Mod. Power Syst. Clean Energy 4, 87–93 (2016). https://doi.org/10.1007/s40565-016-0189-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40565-016-0189-4